CogFixtureTool 定位工具文档
1. 工具概述
CogFixtureTool 是康耐视 VisionPro 视觉软件中的核心坐标系管理工具,主要用于在图像中创建和管理坐标系转换。其核心功能是根据提供的二维变换关系,在图像的原始坐标系(UnfixturedSpace)基础上创建一个新的、与目标物体对齐的稳定坐标系(FixturedSpace),从而为后续的视觉处理(如测量、检测)提供统一的基准。
该工具的核心价值在于实现 “坐标系的动态对齐”。它通过接收一个来自定位工具(如 CogPMAlignTool)的变换参数,建立一个“随动”坐标系,使得即使工件在相机视野中的位置和角度发生变化,后续的所有检测和测量操作都能在一个与工件本身固定的参考系下进行,极大提高了系统的鲁棒性和准确性。
2. 核心功能与特点
- 坐标系创建与添加:CogFixtureTool 的主要任务是在输入图像的坐标空间树中添加一个用户定义的 FixturedSpace(固定空间)。这个新坐标系的原点和方向可以由用户指定,通常与图像中定位到的目标特征(如中心点)对齐。
- 输出图像生成:该工具会创建一幅输出图像。这幅输出图像与输入图像共享相同的像素数据,但其内部的坐标空间树中包含了新创建的 FixturedSpace。其他下游工具可以使用这幅输出图像,并选择在 FixturedSpace 下进行处理。
- 支持多种变换输入:工具可以通过
RunParams.UnfixturedFromFixturedTransform参数接收一个完整的二维变换(包含平移和旋转),也可以分别通过TranslationX、TranslationY和Rotation参数接收平移和旋转分量。前者通常由模板匹配工具的结果(如CogPMAlignTool.Results.Item[0].GetPose())提供,更为常用和便捷。 - 模式选择:工具提供 Compatibility(兼容模式) 和 Enhanced(增强模式) 两种运行模式。兼容模式使用旧版算法以确保与早期项目的兼容性;增强模式使用优化后的新算法,能提供更高的精度和性能,无特殊要求时推荐选择增强模式。
3. 关键概念解析
理解 CogFixtureTool 需要掌握 VisionPro 中的几个基本空间概念:
| 空间概念 | 符号表示 | 含义与特点 |
|---|---|---|
| UnfixturedSpace(非固定空间) | 图像的原始坐标系,通常对应像素空间。 | 原点固定在图像的左上角。无论工件如何移动,这个坐标系都是不变的。 |
| FixturedSpace(固定空间) | 用户通过 CogFixtureTool 新创建的自定义坐标系。 | 原点与方向可以与工件的特定特征对齐。这是一个“随动”坐标系,会跟随工件移动或旋转。 |
| Root Space(根空间) | @ |
所有坐标空间的基础,原点在图像左上角,坐标值为浮点数。 |
| Pixel Space(像素空间) | # |
基于图像像素的坐标系,坐标值为整数。 |
CogFixtureTool 的核心作用是定义从 UnfixturedSpace 到 FixturedSpace 的映射关系。工具运行后,会输出一幅新的图像,这幅图像的 SelectedSpaceName(当前选中的空间)可以是 UnfixturedSpace 或 FixturedSpace,这取决于工具的 SpaceToOutput 属性设置。
4. 在 QuickBuild 中的配置流程
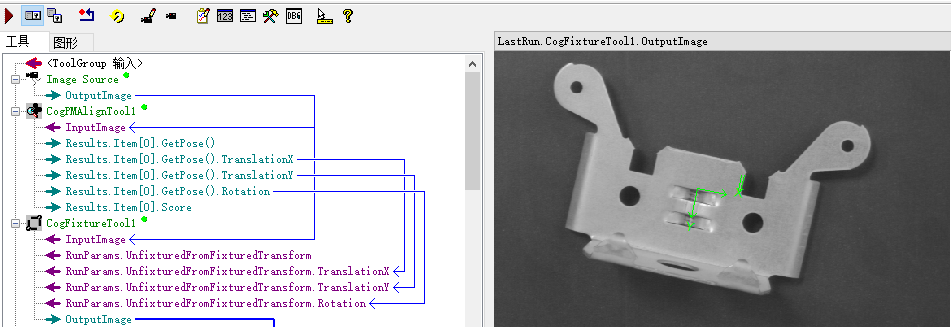
4.1 添加与连接工具
- 添加工具:在 QuickBuild 的工具箱中,找到
Calibration & Fixturing类别下的CogFixtureTool,将其拖放到作业中。通常将其放置在定位工具(如CogPMAlignTool)之后。 - 连接图像源:将工具的
InputImage链接到图像源或上一个工具的OutputImage。 - 提供变换关系(最关键的一步):将定位工具(如
CogPMAlignTool)得到的位姿结果(通常是Results.Item[0].GetPose())链接到 CogFixtureTool 的RunParams.UnfixturedFromFixturedTransform参数。这相当于告诉工具如何创建新坐标系。
4.2 关键参数设置
在工具的属性窗口中,需配置以下参数:
- Action:通常设置为
EstablishNewFixture,以创建一个新的固定坐标系。 - SpaceTo Output:选择输出图像的当前空间,决定下游工具默认在哪个坐标系下工作。
- FixturedSpace Name:为新建的坐标系设置一个唯一的名称。当项目中存在多个 CogFixtureTool 时,务必确保名称不重复,以避免冲突。
- FixturedSpace Duplicate Handling:在
Compatibility(兼容模式)和Enhanced(增强模式)中选择。无特殊要求时,建议选择Enhanced以获得更好的性能。
5. 完整工作流程与数据流向
一个典型的使用 CogFixtureTool 的视觉处理流程如下:
- 图像获取与定位:
- 使用
CogPMAlignTool(模板匹配工具)在图像中搜索并定位工件。该工具输出找到工件的位置和角度信息(一个二维变换关系)。
- 使用
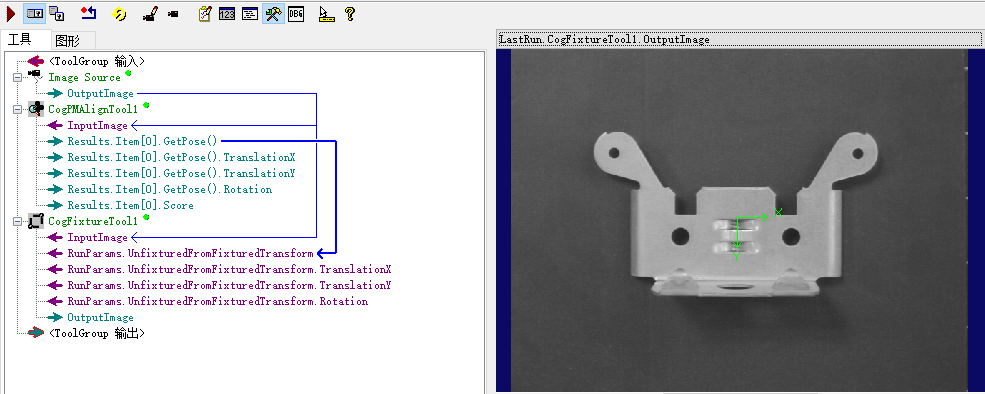
- 建立固定坐标系:
- 将
CogPMAlignTool的Results.Item[0].GetPose()输出链接到CogFixtureTool的RunParams.UnfixturedFromFixturedTransform输入。 CogFixtureTool根据此变换关系创建一个新的坐标系(FixturedSpace),其原点位于匹配到的工件中心,方向与工件方向对齐。
- 将
- 执行精确测量/检测:
- 后续的测量工具(如
CogCaliperTool卡尺工具)将其输入图像和坐标空间链接到CogFixtureTool的输出。 - 这些工具将在新的固定坐标系下工作,无论工件在视野中如何移动或旋转,测量基准始终与工件绑定,从而保证结果的稳定性和准确性。
- 后续的测量工具(如
6. 主要应用场景
- 高精度尺寸测量:在生产线上对零件进行检测时,零件可能以不同的角度和位置出现在相机视野中。使用 CogFixtureTool 可以将零件图像统一对齐到标准坐标系,从而保证测量工具(如卡尺)始终在正确的位置进行测量,提高检测的准确性和鲁棒性。
- 机器人引导:在机器人抓取或加工应用中,CogFixtureTool 可以将图像中识别到的目标物体的坐标转换到机器人的基坐标系中,引导机器人准确移动到目标位置。
7. 注意事项与技巧
- 空间名称唯一性:当您的项目中存在多个 CogFixtureTool 时,务必为每个工具定义的固定空间设置唯一的名称,以避免冲突和混淆。
- 确保链接正确:务必确保定位工具(如 CogPMAlignTool)的结果正确链接到 CogFixtureTool 的变换参数(通常是
RunParams.UnfixturedFromFixturedTransform),这是工具正常工作的基础。 - 理解变换方向:参数
RunParams.UnfixturedFromFixturedTransform定义了从固定空间(FixturedSpace)反向映射回非固定空间(UnfixturedSpace)的变换关系。虽然参数名容易引起困惑,但通常我们只需将匹配工具的GetPose()结果链接至此即可。 - 替代工具:除了 CogFixtureTool,VisionPro 还提供了
CogFixtureNPointToNPointTool,它可以通过多组点对来计算复杂的线性或非线性变换模型,常用于特定标定场景。
实践效果















![P4427 [BJOI2018] 求和](http://pic.xiahunao.cn/P4427 [BJOI2018] 求和)
string——下)


