工业相机的芯片CRA角度与镜头选型的匹配关系
- Baumer工业相机
- 工业相机的芯片CRA角度的技术背景
- 工业相机的芯片CRA的信息
- CRA相差过大的具体表现
- 怎样选择工业相机sensor的CRA
- Baumer工业相机sensor的CRA
- 工业相机的芯片CRA角度与镜头匹配好的优点
Baumer工业相机
工业相机是常用与工业视觉领域的常用专业视觉核心部件,拥有多种属性,是机器视觉系统中的核心部件,具有不可替代的重要功能。
工业相机已经被广泛应用于工业生产线在线检测、智能交通,机器视觉,科研,军事科学,航天航空等众多领域
工业相机的主要参数包括:分辨率、帧率、像素、像元尺寸、光谱响应特性等,本文主要介绍工业相机的芯片CRA角度与镜头选型的匹配关系
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有快速数据传输、低功耗、易于集成以及高度可扩展性等特点。
工业相机的芯片CRA角度的技术背景
晶圆
晶圆Wafer,是指制作半导体电路所用的硅晶片,其原始材料是硅。高纯度的多晶硅溶解后掺入硅晶体晶种,然后慢慢拉出,形成圆柱形的单晶硅。硅晶棒在经过研磨,抛光,切片后,形成硅晶圆片,也就是晶圆。以8英寸和12英寸为主。
拜尔滤色镜
这种滤色器的排列是50%是绿色,25%是红色,25%是蓝色,因此也被称为RGBG
拜耳阵列的问题之一是,在拍摄具有重复细节的画面时,容易产生彩色干扰信息。该问题是由于其规则的分布方式而造成的。其具体表现为画面中产生难看的色带,而解决该问题的方法是传感器前安装一块会将画面细节模糊化的AA滤镜。低通滤镜可以减弱摩尔纹,但同时也降低了相机分辨率。
由于传感器的像素只能区分接收到光线的强弱,无法分辨色彩。因此为了重建色彩信息,需要在每个像素上涂敷不同色彩的滤镜。不同的像素感应不同的色彩,还原色彩。
CMOS芯片
CMOS本是计算机系统内一种重要的半导体,保存了系统引导最基本的资料。CMOS的制造技术和一般计算机芯片没什么差别,主要是利用硅和锗这两种元素所做成的半导体,使其在CMOS上共存着带N和P级的半导体。这两个互补效应所产生的电流即可被处理芯片记录和解读成影像。后来发现CMOS经过加工也可以作为数码摄影中的图像传感器,CMOS传感器也可细分为被动式像素传感器和主动式传感器。
人们如此看好CMOS图像转换器的成长前景是基于这样一个事实,即:与垄断该领域长达30多年的CCD技术相比,它能够更好地满足用户对各种应用中新型图像传感器不断提升的品质要求,如更加灵活的图像捕获、更高的灵敏度、更宽的动态范围、更高的分辨率、更低的功耗以及更加优良的系统集成等。
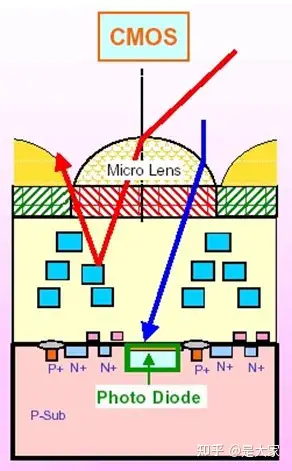
CMOS(complementary metal-oxide-semiconductor:互补金属氧化物半导体)芯片由微透镜层、滤色片层、线路层、感光元件层、基板层组成。
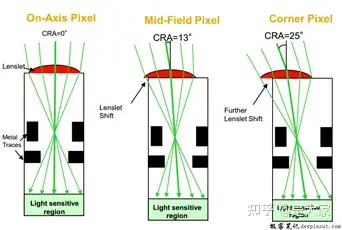
由于光线进入各个单像素的角度不同,因此在每个单像素上表面增加了一个微透镜修正光线角度,使光线垂直进入感光元件表面。这就是芯片CRA的概念,需要与镜头的CRA保持在一点的偏差范围内。
CRA(chief ray angle)主光线角度
Lens CRA 就是最大像高处的主光线与光轴的倾角;
Sensor CRA ,也就是SENSOR 的MICRO LENS 与光电二极管的位置存在一个水平误差,并不在一条直线上(这个偏差角就是sensor的CRA)。做成这样的目的,这样的做的目的也是为了好搭配LENS 。
在相机镜头光学特性参数设定中,由于光线进入各个单像素的角度不一样,因此在每个单像素上表面增加了一个微透镜修正光线角度,使光线垂直进入感光元件表面,这就是芯片CRA的概念,它需要与镜头的CRA保持在一点的偏差范围内。
通常来讲,Sensor的效能与Sensor本身的灵敏度和光线入射的角度有关。而光线入射到Sensorpixel的角度是由Lens的CRA和Sensor的Micro Lens开口布局(Sensor的CRA)共同决定的。
从镜头的传感器一侧,可以聚焦到像素上的光线的最大角度被定义为一个参数,称为主光角(CRA)。对于主光角的一般性定义是:此角度处的像素响应降低为零度角像素响应的80%。
通常来讲,sensor的效能与sensor本身的灵敏度和光线入射的角度有关。而光线入射到sensor pixel的角度由lens的CRA和sensor的micro lens开口布局共同决定的。
从镜头的传感器一侧,可以聚焦到像素上的光线的最大角度被定义为一个参数,称为主光角(CRA),一般性定义是:此角度处的像素响度降低为零度角像素响应的80%。
CRA主光角测试的重要性:
按通常的做法,因为SENSOR的Micro Lens与光电二极管之间存在一定的距离,这样做的目的也是为了方便搭配Lens。此外,lens存在一个CRA值,这在Lens设计的时候就要考虑的内容,根据sensor的CRA值进行设计,一般建议sensor与lens的CRA角度差控制在正负2~3度以内,并不是Lens的CRA值越小越好,而是与sensor的CRA值越近越好。
什么是sensor的CRA
Sensor有一个CRA值,也就是sensor的micro lens与光电二极管的位置存在一个水平误差,并不在一条直线上,做成这样有一定的目的,按通常的做法,因为sensor的micro lens与光电二极管之间存在一定的距离,这样做的目的也是为了好搭配lens。因为CRA为0度的lens还是不好找的。
普通的FSI的sensor都有一个类似光子井的结构来用来收集光子:
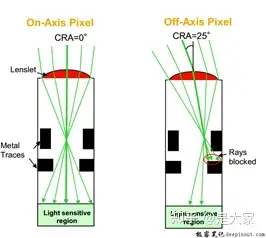
当CRA增加的时候,光线会被金属电路层阻挡掉一部分,导致sensor接受光的效能降低。
那么:
1、pixel越大,这种影响会越小:
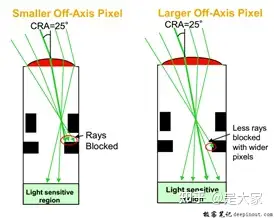
2、对于BSI的sensor,这种影响也会更小
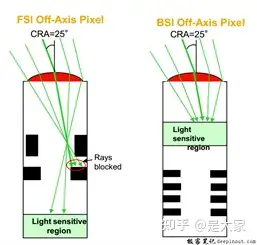
因此对于FSI的sensor来说,通常会通过移动sensor表面的micro lens来收集更多的光线:
工业相机的芯片CRA的信息
CRA(Chief Ray Angel)
Lens CRA 就是最大像高处的主光线与光轴的倾角;
Sensor CRA ,也就是SENSOR 的MICRO LENS 与光电二极管的位置存在一个水平误差,并不在一条直线上(这个偏差角就是sensor的CRA)。做成这样的目的,这样的做的目的也是为了好搭配LENS 。
在相机镜头光学特性参数设定中,由于光线进入各个单像素的角度不一样,因此在每个单像素上表面增加了一个微透镜修正光线角度,使光线垂直进入感光元件表面,这就是芯片CRA的概念,它需要与镜头的CRA保持在一点的偏差范围内。
通常来讲,Sensor的效能与Sensor本身的灵敏度和光线入射的角度有关。而光线入射到Sensorpixel的角度是由Lens的CRA和Sensor的Micro Lens开口布局(Sensor的CRA)共同决定的。
从镜头的传感器一侧,可以聚焦到像素上的光线的最大角度被定义为一个参数,称为主光角(CRA)。对于主光角的一般性定义是:此角度处的像素响应降低为零度角像素响应的80%。
CRA Matching
在光学系统中,sensor上的光学接收效率不仅与CRA有关,还与Sensor的Micro lens开口布局有关。因此在做Lens涉及时,CRA要尽量符合Sensor厂家提供的CRA参考值,提高功能接收效率。
通常Lens CRA要小于sensor的CRA,允许有3°以内的偏差。这是因为:
镜头CRA太过小于Sensor的CRA时,会出现四角偏暗(受光不足),光线无法到达sensor边缘,即Lens Shading;
镜头CRA太过大于Sensor的CRA时,光线会折射到临近的pixel上,导致pixel间出现串扰,即Color shading,且在图像四周表现更明显;
建议优先保证Color Shading, 因为Lens Shading比Color Shading容易调试;
并不是LENS CRA 越小越好,有人认为0度是最佳的,那也是不对的,只能说与SENSOR 的CRA 越接近越好。
镜头CRA和传感器CRA不匹配的影响:
不匹配导致整个图像的颜色不平衡产生串扰,从而导致信噪比(SNR)的降低;因为CCM需要增加数字增益来补偿光电二极管中的信号损失。
像高(Image Height)的最大值是对角线长度
因为镜头是圆的,画面的对角线是最接近镜头成像直径的,所以最大尺寸是对角线尺寸。
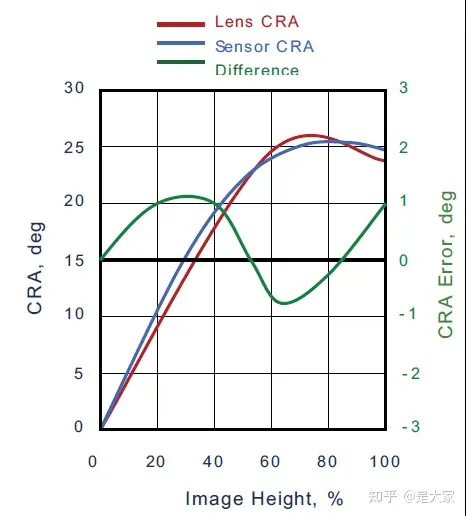
CRA与像高的关系(摘自OV某款sensor规格书):

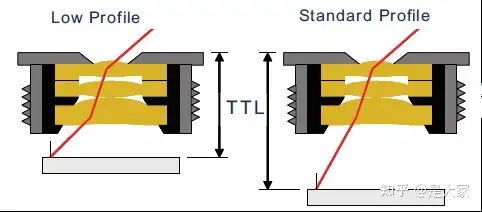
从上图可以看出镜头的TTL也是决定CRA角度的关键,TTL越低CRA的角度就越大,所以小像素的Image sensor对于相机系统设计时的镜头CRA匹配也至关重要。
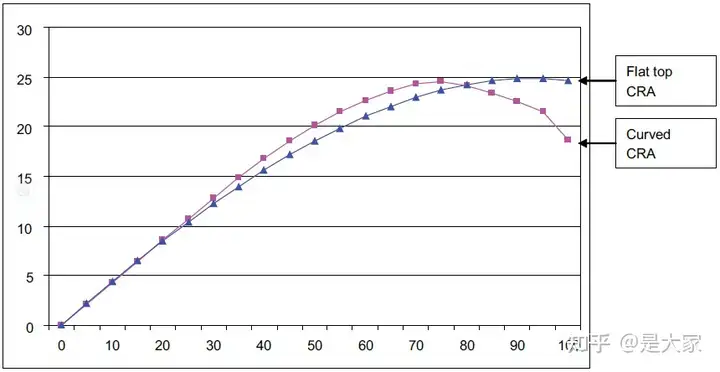
通常,出于各种原因,镜头CRA与Image sensor CRA并不完全匹配。 实验上已经观察到,与弯曲的CRA相比,具有平坦顶部(最小翻转)的镜头CRA曲线更能容忍相机模块的装配变化。
如下图显示平顶和弯曲CRA的示例。
-
当Pixel的尺寸越来越小时,即分辨率越高, 边缘的Pixel越容易受到影响;
-
当CCM的尺寸越来越小时,即Lens的距离变短,CRA的角度影响变大。
镜头CRA与芯片不匹配可能会产生的影响:
-
不能确保可以准确的捕获光子到硅光电二极管中;
-
会导致信噪比(SNR)的降低 (颜色不平衡产生干扰);
-
图像不清、有雾、反差度低、颜色变淡、景深变小。
CRA相差过大的具体表现
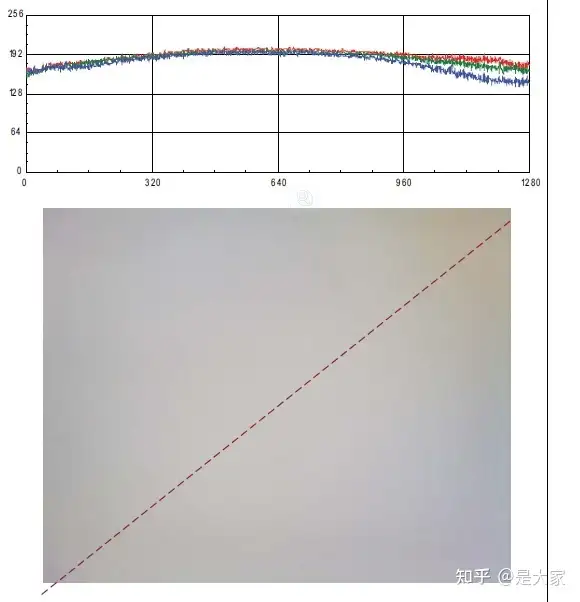
镜头的CRA与Image sensor的CRA相差过大会出现如下图偏色。
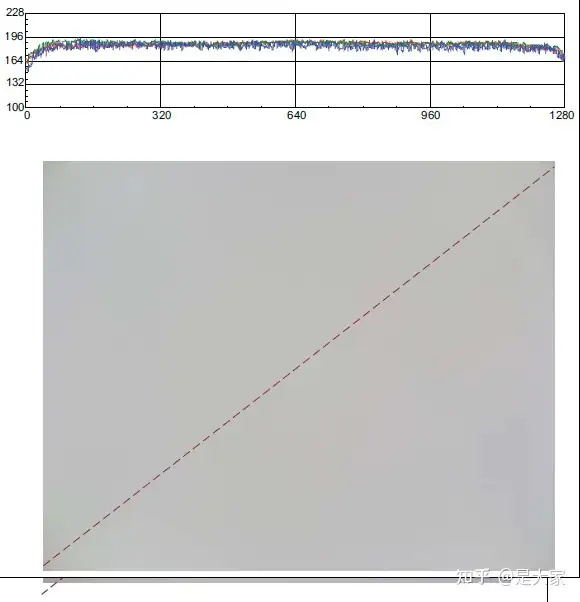
镜头的CRA与Image sensor的CRA匹配则图像正常,如下图:
怎样选择工业相机sensor的CRA
-
广角镜头:这时一般lens的CRA比较大,需要选择CRA大于25度的sensor或者BSI的Sensor;一般用于手机、安防、玩具、网络摄像头等;
-
超长焦镜头:这时一般lens的CRA比较小,需要选择CRA为0度的sensor;一般用于安防、机器视觉等。
-
变焦镜头:这时Lens的CRA是变化的,一般需要根据实际应用选择,最好采用大Pixel,BSI的sensor;一般用于安防等。
Baumer工业相机sensor的CRA
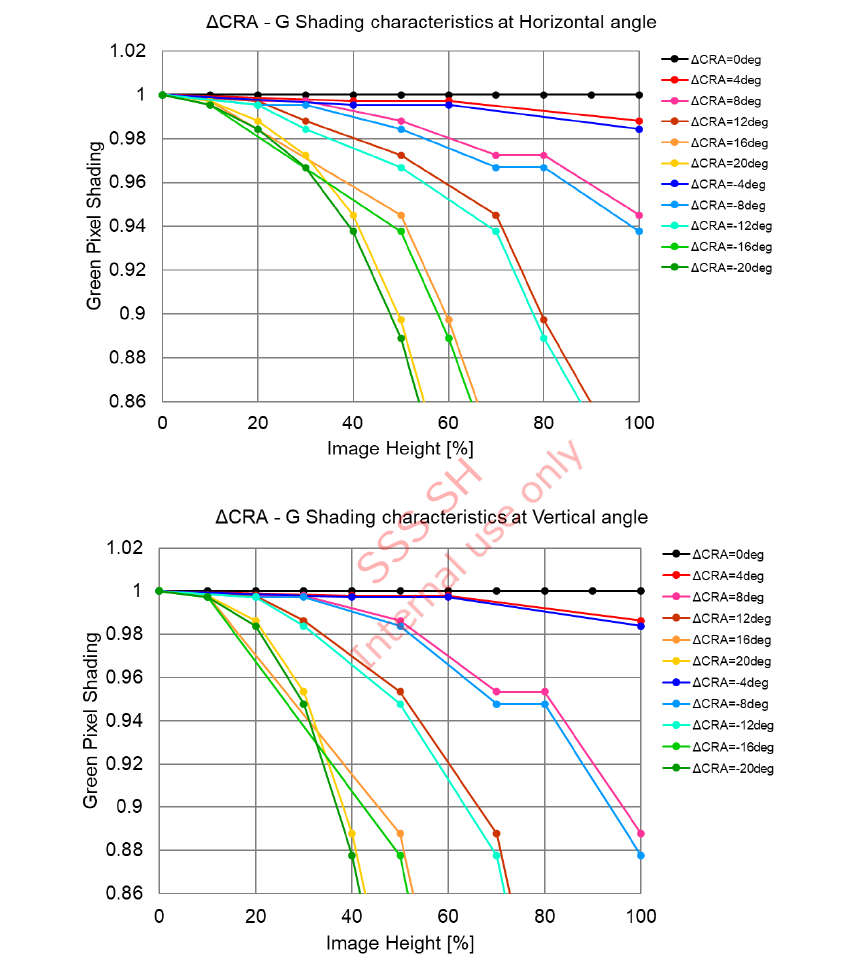
如下为VCXG.2-82M对应芯片的CRA相关数据,
ΔCRA指的是镜头和sensor的CRA差值。
pixel shading是不同视场的亮度/中心亮度的比值。
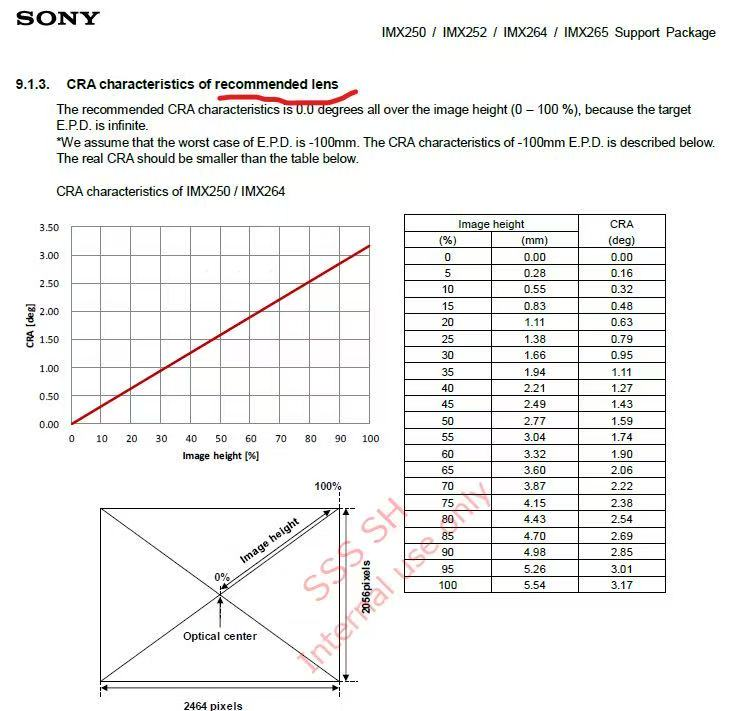
下图是sony芯片IMX2系列有关于CRA的镜头匹配说明:
工业相机的芯片CRA角度与镜头匹配好的优点
工业相机的芯片CRA(Chief Ray Angle,主光线角度)与镜头匹配好具有以下优点:
- 提高成像质量
- 避免光线损失:当芯片CRA与镜头匹配良好时,镜头出射的主光线能够以合适的角度入射到芯片上,最大限度地减少光线在芯片表面的反射和折射损失,从而提高图像的整体亮度和对比度,使拍摄的图像更加清晰、鲜明。
- 减少色差:匹配良好的CRA可以使不同波长的光线在芯片上的成像位置更加准确,减少因光线角度偏差导致的色差现象,即避免彩色图像中出现颜色边缘或色彩失真的情况,提高图像的色彩还原度。
- 改善分辨率:合适的CRA角度能确保光线准确地聚焦在芯片的感光单元上,使图像的细节得到更好的保留,从而提高图像的分辨率,有助于清晰地分辨出物体的细微特征和结构。
- 优化图像均匀性
- 避免暗角现象:如果镜头与芯片的CRA不匹配,可能会导致光线在芯片边缘部分的入射角过大,使得边缘部分的光线收集效率低于中心部分,从而产生暗角现象。而良好的CRA匹配可以使光线均匀地分布在芯片上,避免出现图像边缘过暗或不均匀的情况,保证整个图像的亮度均匀性。
- 减少色彩偏差:除了亮度均匀性,CRA匹配良好还有助于保持色彩的均匀性。在不同区域,光线入射角的一致性可以避免因光线角度差异导致的色彩感知差异,确保图像在整个视场内的色彩一致性和准确性。
- 增强系统稳定性
- 提高测量精度:在工业检测等应用中,需要对物体进行精确的测量和分析。芯片CRA与镜头的良好匹配可以保证成像的稳定性和准确性,从而提高测量精度,减少因成像质量不稳定导致的测量误差,为工业生产中的质量控制和检测提供可靠的数据支持。
- 降低系统对环境的敏感性:匹配良好的CRA可以使工业相机系统在不同的环境条件下(如不同的光照强度、角度等)保持相对稳定的成像性能。这意味着系统对环境变化的适应性更强,能够在更广泛的工作条件下正常运行,减少因环境因素导致的图像质量下降或系统故障的可能性。
)



Day6-Python3 正则表达式)









:概率分布差异的量化利器)




