1.课题概述
倒立摆是一个典型的不稳定、非线性、强耦合的控制对象。其控制目标是通过施加合适的力(或扭矩)使倒立摆能够在垂直位置附近保持平衡。在本课题中,基于神经网络控制器的倒立摆控制系统simulink建模与仿真,对比模糊控制器。
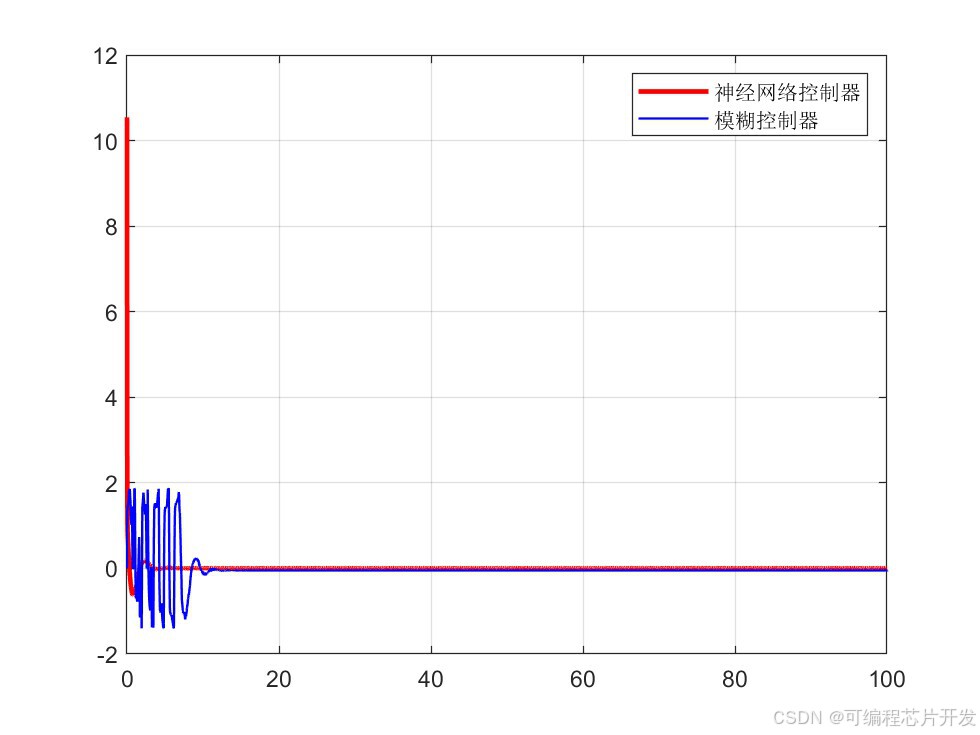
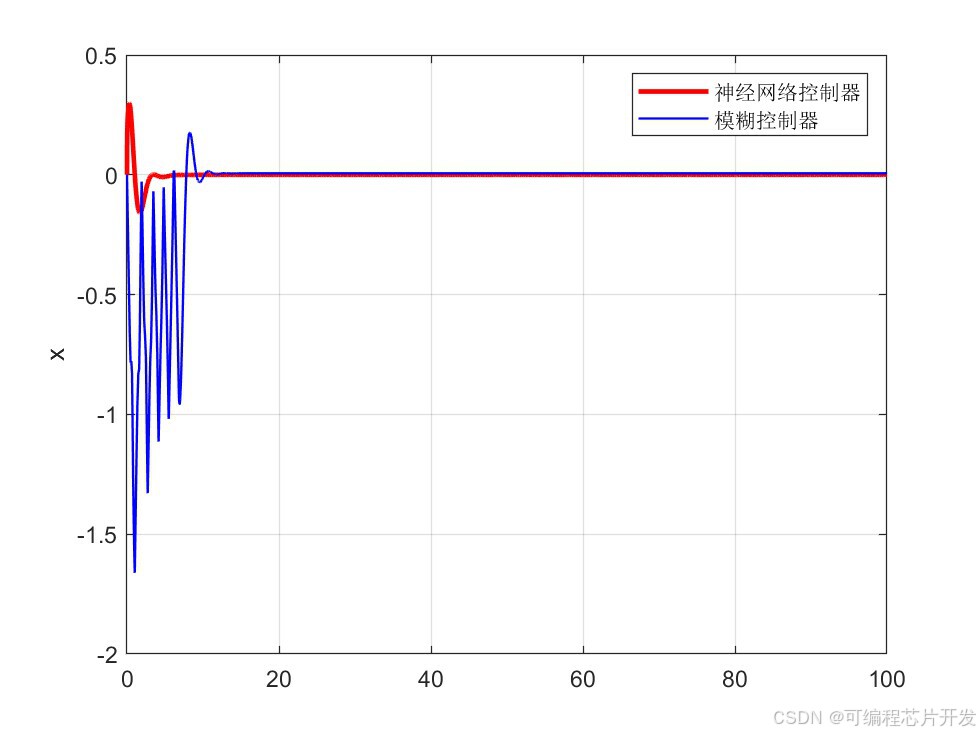
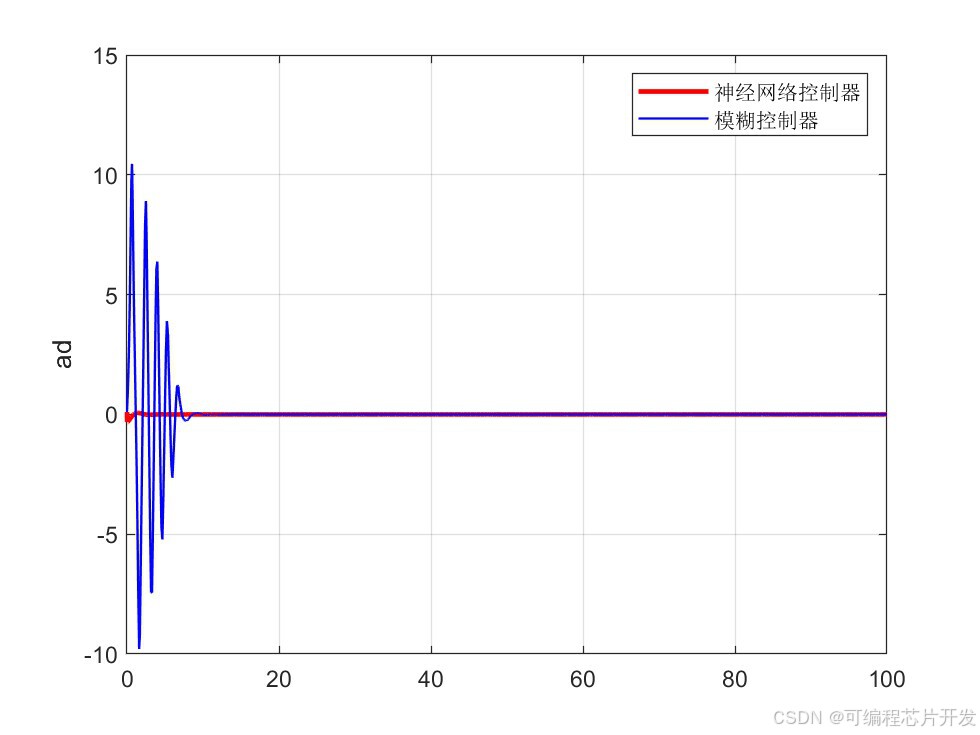
2.系统仿真结果
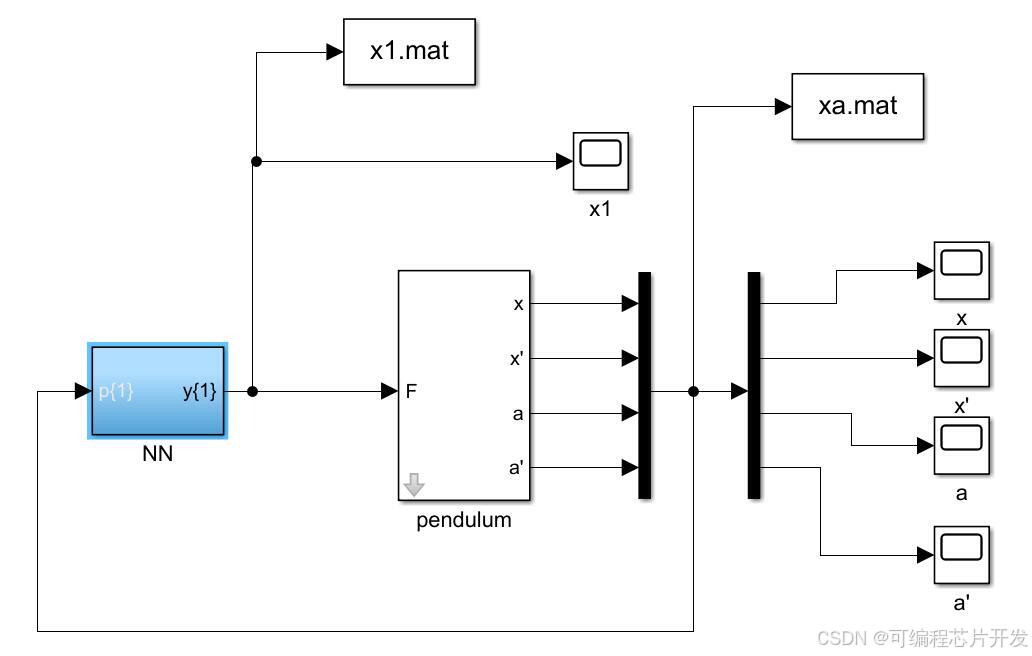
3.核心程序与模型
版本:MATLAB2022a
4.系统原理简介
倒立摆是一个典型的不稳定、非线性、强耦合的控制对象。其控制目标是通过施加合适的力(或扭矩)使倒立摆能够在垂直位置附近保持平衡。
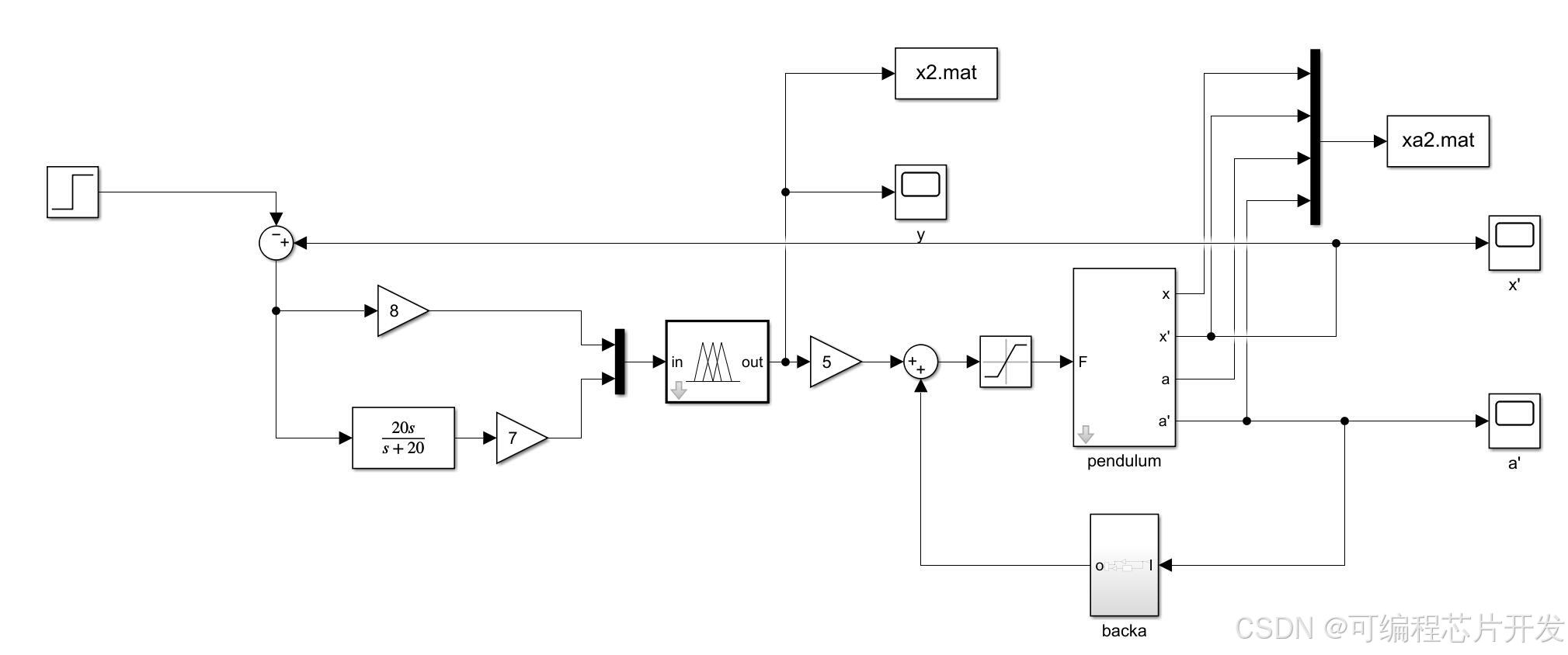
模型结构:
模糊控制器是基于模糊规则和隶属度函数构建的,其规则库需要人工设计,依赖于专家知识和经验。而神经网络控制器是由大量神经元组成的网络结构,通过训练数据自动学习系统的输入 - 输出关系,不需要显式的规则。
适应性和泛化能力:
神经网络控制器具有较强的适应性和泛化能力。一旦训练好,它可以对不同的工况和系统参数变化有较好的适应能力。模糊控制器的适应性相对较弱,当系统发生较大变化时,可能需要重新调整模糊规则和隶属度函数。
计算复杂度:
模糊控制器的计算主要集中在模糊化、模糊推理和清晰化过程,计算复杂度相对较低。神经网络控制器在训练过程中计算复杂度较高,尤其是在反向传播算法中涉及大量的矩阵运算和梯度计算,但在推理阶段(控制应用阶段)计算相对简单。
精度和稳定性:
神经网络控制器通过大量的训练数据可以实现较高的控制精度,并且能够在复杂的非线性系统中找到较好的控制策略。模糊控制器的精度依赖于模糊规则和隶属度函数的设计,在某些复杂情况下可能无法达到神经网络控制器的精度。在稳定性方面,两种控制器都可以通过合理的设计实现系统的稳定控制,但神经网络控制器可能需要更多的实验和调整来确保稳定性。












 - Invinc)


)

)

)