让数据真正闭环的L4级自动驾驶仿真工具链-杭州千岑智能科技有限公司:RSim
随着汽车电子电气架构向域控制器方向演进,硬件在环(HIL)测试已成为验证域控制器功能安全性和可靠性的关键手段。本方案针对智驾域控制器设计了一套完整的HIL测试系统,采用分布式实时仿真架构,支持多传感器信号注入与同步,实现ASIL-D级功能安全验证,并提供自动化测试流程与数据分析能力。该系统可显著降低域控制器研发与测试成本,缩短研发周期,并确保在各种复杂场景下的功能安全。
系统架构设计
1. 硬件平台配置
核心处理器:选用国内外实时处理器作为主控制器,CPU≥2.8GHz,内存≥1.5GB,满足复杂模型的实时计算需求,仿真延迟≤1ms的。对于多域融合测试场景,采用分布式架构,通过添加辅助处理器来扩展算力。
信号接口模块:
- 视频信号注入:配置12通道HDMI视频注入,支持4K@30fps及以上分辨率,提供PTP时间戳同步功能,满足多通道数据同步精度<1ms 。
- 雷达信号注入:集成77GHz毫米波雷达回波模拟器,支持多目标点云生成(≥8个目标),角分辨率≤1°,距离精度≤0.5m。
- 总线通信接口:配置支持CAN/CANFD、以太网(SOME/IP、DoIP)的通信板卡,达成三重物理通信链路冗余设计,满足ASIL-D级通信安全要求。
- I/O信号接口:配备多通道数字I/O板卡和模拟量板卡,支持域控制器所有硬线信号的模拟与采集。
2. 软件平台集成
试验管理软件:提供场景编辑、信号注入、故障模拟和测试监控功能。CANoe协助与RSim等车辆动力学模型的联合仿真,通过FMI接口实现内容同步。
自动化测试工具:实现测试用例的组织、执行和结果分析,经过API调用实现测试自动化。
场景仿真软件:使用RSim构建高精度车辆动力学模型和场景。RSim献出道路参数设置、目标类型定义和环境模型配置效果,支持快速搭建测试场景。
传感器仿真模块:
- 视觉传感器:通过视频注入板卡模拟摄像头信号,协助动态场景渲染和光照条件调整
- 雷达传感器:通过回波模拟器生成毫米波/激光雷达信号,支持目标距离、速度和方向的精确控制
- 超声波传感器:通过物理模型模拟障碍物反射,生成16个扇区的距离信息
多传感器仿真方案
1. 摄像头信号注入
视频注入技术:通过HDMI或GMSL接口将RSim虚拟场景渲染的图像传输给域控制器。帮助12通道高清视频注入,结合FPGA技术可优化实时性,确保端到端延迟满足自动驾驶HIL测试需求。
场景渲染:在RSim中构建高精度道路和交通环境模型,包括车道线、交通标志、行人、车辆等目标物。凭借调整场景参数(如光照强度、天气条件)模拟不同环境下的视觉感知效果。
同步机制:利用gPTP协议实现硬件级时间戳同步,将视频信号的时间戳精度控制在±50ns范围内。通过PTP时间戳作用保证多通道数据的同步性,满足传感器融合测试需求。

2. 雷达信号仿真
毫米波雷达回波模拟:采用高精度回波模拟器生成77GHz毫米波雷达信号,帮助多目标点云生成和动态目标轨迹模拟。回波模拟器可精确控制目标距离、速度和方向,模拟不同天气条件下的雷达感知效果。
激光雷达点云生成:通过RSim虚拟场景渲染生成高精度激光雷达点云数据,支持不同线束(如128线束级点云)和探测范围的配置。点云材料可通过以太网接口传输给域控制器,完成与真实激光雷达的信号兼容。
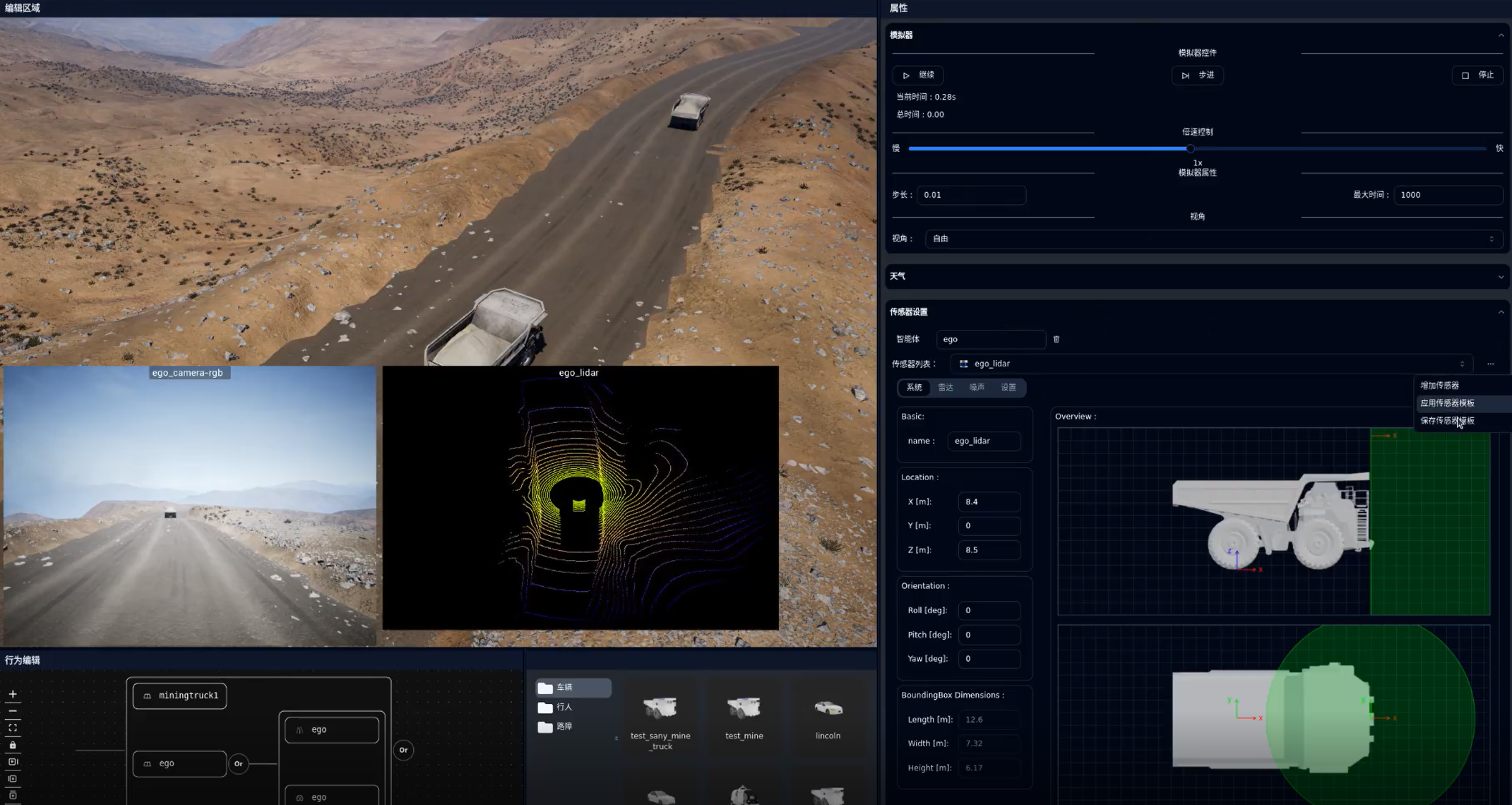
超声波雷达扇区模拟:在RSim场景仿真软件中配置超声波雷达模型,将车身四周划分为16个扇区,输出每个扇区的障碍物距离信息。通过TCP/UDP协议将扇区素材发送至试验管理软件,再通过总线信号注入域控制器。
3. 传感器信号同步
时间同步:采用gPTP协议实现多传感器信号的时间同步,确保摄像头图像、雷达点云和CAN总线信号的时间戳一致性。通过硬件时间戳机制抵消车载电磁环境对软件时间戳的干扰,将同步精度控制在毫秒级。
触发同步:设计硬件触发同步机制,依据外部触发信号确保各传感器仿真模块的同步启动和运行。触发信号可通过以太网或专用触发接口传输,确保多传感器数据采集的同步性。
数据同步:在试验管理软件中实现多传感器数据的同步处理和注入,通过共享内存或消息队列机制实现数据缓冲和同步。确保摄像头、雷达和CAN总线信号在域控制器输入端的时间偏差控制在安全范围内。
基于特性安全标准的测试用例开发
1. ASIL-D级功能安全测试用例
通信故障测试:模拟CAN/CANFD总线通信故障(如信号丢失、超时、校验错误),验证域控制器在ASIL-D级通信故障下的安全响应。测试用例需覆盖通信超时故障(≤200μs检测时间)、校验错误故障(序列号校验、数据帧校验和CRC校验)等场景。
传感器故障测试:模拟摄像头、雷达等传感器的故障(如图像噪声、点云丢失、信号漂移),验证域控制器在传感器失效时的安全机制。测试用例需覆盖传感器信号异常(如边界值、等价类划分)和传感器完全失效的情况。
执行器故障测试:模拟电机、制动器等执行器的故障(如扭矩失控、响应延迟),验证域控制器在执行器失效时的安全策略。测试用例需覆盖执行器信号异常和执行器完全失效的场景。
冗余系统测试:验证域控制器的冗余设计(如三模冗余TMR)在单点故障情况下的容错能力。测试用例需覆盖主处理器故障、通信链路故障和传感器故障等场景,验证冗余平台的正确切换和安全状态进入时间。
2. 测试用例开发方法
需求分析法:基于域控制器的功能安全需求文档,将安全目标转化为具体的测试用例。例如,针对"车辆动力系统信号异常时转向锁上锁禁止"的安全目标,设计通信超时、校验错误等测试场景。
边界值分析法:针对传感器信号的边界值设计测试用例,如摄像头图像噪声边界、雷达探测距离边界等。通过测试边界值附近的信号,验证域控制器在极限条件下的功能安全。
场景分析法:基于典型驾驶场景设计测试用例,如自动泊车、紧急制动、车道保持等场景。借助模拟复杂交通环境和极端天气条件,验证域控制器在多传感器融合下的能力安全。
失效模式分析法:基于域控制器的失效模式分析结果,设计相应的测试用例,验证系统在各种失效模式下的安全性能。例如,针对"主从MCU通信故障"的失效模式,设计通信超时和校验错误的测试场景。
3. 测试用例执行与评估
测试环境配备:根据测试用例需求,在RSim中,配置相应的传感器仿真参数、车辆动力学模型和通信环境。例如,针对"摄像头在强光下噪声模型"的测试用例,调整场景光照强度和摄像头噪声参数。
测试用例执行:通过自动执行测试用例,记录域控制器的输出信号和执行状态。例如,执行"CANoe PrpsnActvn通信丢失,200ms内进入安全状态,禁止执行闭锁"的测试用例,记录域控制器的安全状态进入时间和响应动作。
否存在漏转发现象。就是测试结果评估:根据测试用例的预期结果,评估域控制器的作用安全性能。例如,对于"路由报文数量测试",比较发送报文数量和接收报文数量,判断
测试覆盖度分析:统计测试用例对功能安全需求和代码结构的覆盖度,确保需求覆盖度达到100%,代码结构覆盖度满足ASIL-D级要求。
自动化测试流程实现
分布式测试框架:采用RSim的分布式测试架构,实现多平台协同测试。CANoe负责总线仿真和测试监控,实时机负责实时模型执行,RSim负责测试流程管理和结果分析。
自动化脚本编写:基于Python语言开发自动化测试脚本,实现测试用例的自动执行、数据采集和结果评估。
测试数据管理:构建统一的测试数据管理系统,实现测试参数、场景和用例的集中管理。通过参数化调整,快速切换不同车型和测试场景的配置参数。
测试报告生成:集成RSim的报告生成功能,自动生成符合ISO 26262要求的测试报告。报告内容包括测试结果、覆盖度报告和需求追溯报告等。

系统集成与部署
硬件集成:将实时处理器、视频注入板卡、雷达回波模拟器和通信板卡集成到测试机柜中,实现硬件资源的集中管理和控制。
软件集成:将CANoe等集成到测试平台中,构建软件功能的协同工作。通过API调用和数据交换,实现测试流程的自动化执行和结果分析。
传感器集成:将摄像头、雷达和超声波传感器的仿真模块集成到测试平台中,构建多传感器信号的同步注入。利用PTP时间戳功能保证多通道数据的同步性,满足传感器融合测试需求。
通信集成:将CAN/CANFD、以太网(SOME/IP、DoIP)等通信协议的仿真模块集成到测试平台中,达成通信环境的精确模拟。利用三重物理通信链路冗余设计,满足ASIL-D级通信安全要求 。
总结
域控制器HIL测试系统是验证自动驾驶功能安全性和可靠性的关键工具。本方案设计的分布式实时仿真架构、多传感器信号注入与同步机制、基于功能安全标准的测试用例开发和自动化测试流程实现,为域控制器的全面验证提供了完整的解决方案。
随着汽车智能化和网联化的不断发展,域控制器HIL测试系统将面临更高的挑战和要求。未来测试系统将向云端虚拟化和数字孪生方向演进,实现测试资源的分布式部署和全生命周期测试。同时,测试系统将更加注重与实车测试的协同,形成完整的测试验证体系。
在实际应用中,域控制器HIL测试架构需要根据具体车型和功能需求进行定制化设计,确保测试的针对性和有效性。通过不断优化测试系统和测试用例,可以提高测试效率和准确性,为自动驾驶技术的安全落地提供有力保障。



![【光照】[漫反射diffuse]以UnityURP为例](http://pic.xiahunao.cn/【光照】[漫反射diffuse]以UnityURP为例)















