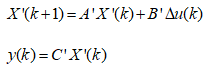
考虑扩展状态空间形式
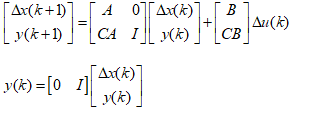
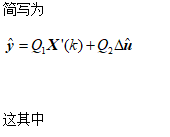
缩写为
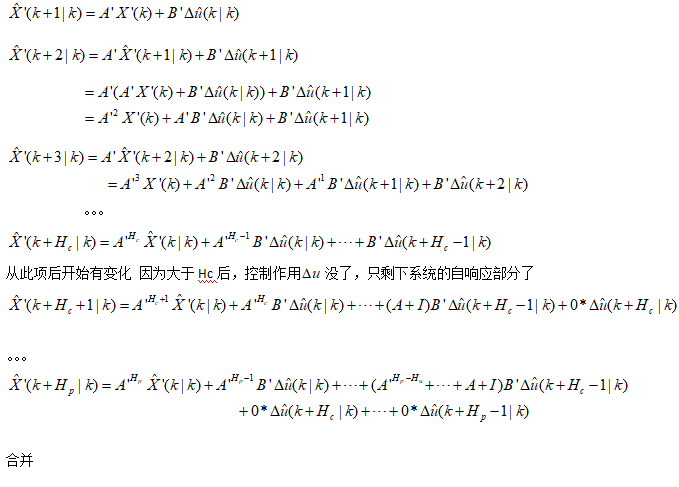
对于未来的预测,这里要注意,默认了最小预测时域为1,如果不为1,从k+1到k++最小预测时域的x的预测为0

模型预测控制matlab运行代码,可实现模型预测控制。
StateMPC是按照钱积新版《预测控制》中4.3.2.1节的方法编写的程序。
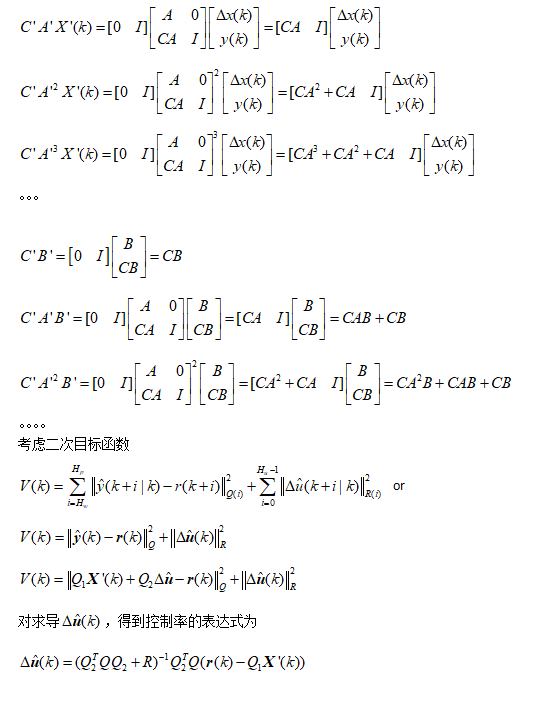
StateMPC1是按照公式4-61,4-62扩展状态空间模型而编写的程序。基于这个模型的控制率的推导请见文件夹里的word文件。
MIMO文件是从网上下载的多入多出系统的state mpc程序。控制率的求解与StateMPC1不同,因为没有说明所以没看懂。
压缩包中是从网上下载的另外一个程序

)


?)








—芯片封装中的开尔文源极)


,图解超赞超详细!!!)
)

