现在电机转子位置估计的研究有两种主流技术路线——一种是无传感器,另一种就是采用低分辨率传感器估计高精度位置。当时我(知乎:土豆泥)本科毕业答辩做的就是霍尔传感器。
其实可以看到,近几年业界越来越多的FOC驱动方案采用霍尔传感器。它成本低,集成方便,在结合转子估计算法后也可以得到比较精确的转子位置。不过这种真正实用的技术,各个驱动器厂家代码保密还是比较严格的,也难怪将近3W的浏览量却没什么回答。
这篇回答我将就霍尔传感器进行精确转子估计技术进行一个梳理。
一、霍尔传感器进行转子估计有什么优势?
1. 相比于高精度编码器——成本低
在高性能 PMSM 控制系统中,为了调节转子速度和位置,一般需要在电机转子轴端安装位置传感器用于转速和位置闭环控制。
常用的高精度位置传感器有光电编码器和旋转变压器。在一些开源电机或机器人项目中,磁编码器可是常客。但这些传感器在使用中会出现一些问题,例如光电编码器对光线、灰尘、油污、潮湿等环境因素比较敏感,容易发生机械磨损,同时其编码精度容易受到体积限制。
当然这些编码器也有一些灵活的变式,例如在机器人关节里面,光栅盘会直接集成在关节定子端盖上,而光源和接收器随着转子转动。但总的来说,高精度编码器成本高,集成困难,在现在这种越来越卷的电机市场没啥优势。
2. 相比于无感算法——低速不准确
无感算法就是不使用传感器,通过电机自身特征估计转子位置的方法。这类研究在近二十年来十分火爆,并且已经有许多成熟的应用。但对于大多数应用,完全取消传感器仍然是不可靠的。
一类无感算法是在中高速段,基于电机定子电压方程和电机参考模型实现的(归根到底都是在测反电动势),这类方法主要受到电机参数以及测量的影响。但总体来说比较成熟,甚至相比于霍尔转子估计的角度更为准确。但低速时,因为反电动势小,所以转子估计困难。
另一种方法即高频信号注入法,是基于交流电机磁场凸极特性提出的,可以实现电机在零频率时的正常工作。但高频信号的使用会导致额外的损耗、噪声和振动,这就极大地限制了这种无位置传感器方法在工业以及家电领域中的应用。此外,在加工制造业、新能源汽车和家电等领域,永磁同步电机的应用还以表贴式为主,由于没有磁凸极,高频信号注入法就没法使用了。
链接:https://www.zhihu.com/question/365699377/answer/16963796598
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
所以目前对于一些使用无感算法的电机驱动器,仍然会用霍尔传感器作为低速段的补充。
二、霍尔传感器转子估计的预备知识
1. 同步相位角
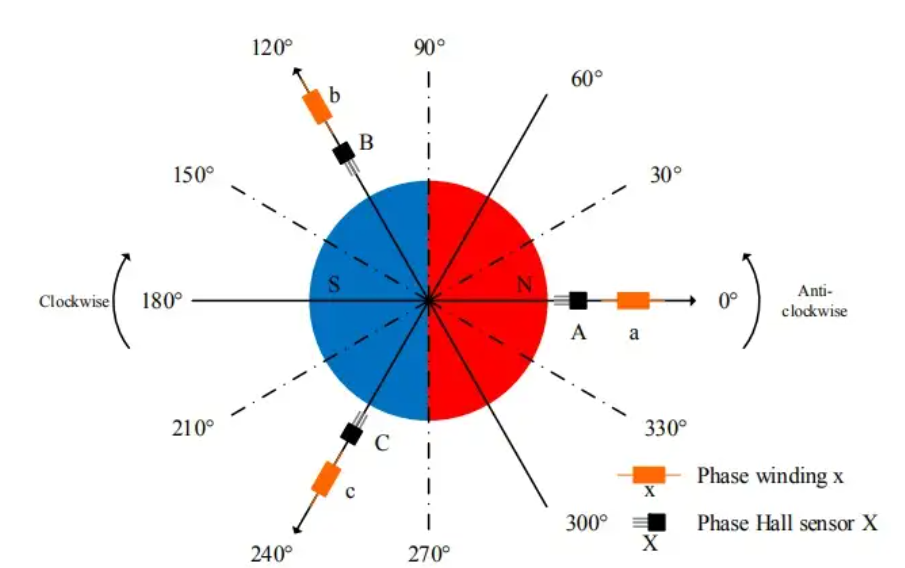
什么是同步相位角呢?简单来说,就是霍尔传感器角度为0处转子位置与电机电角度为0处转子位置的角度差。一般来说,我们认为HALL A的上升沿对应霍尔传感器角度为0的转子位置,而A相绕组反电动势的峰值处对应了电角度为0的转子位置。
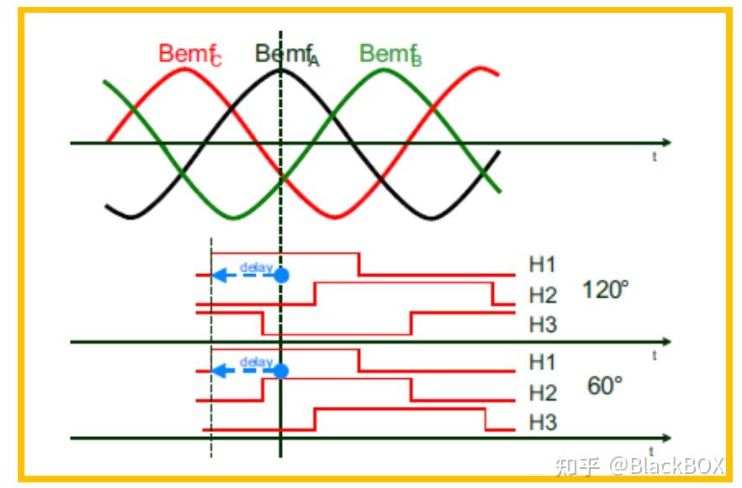
我们拿上面这张图举例子解释一下。反电动势是由永磁体随转子转动产生的动生电动势,图中转子正好转动到与A相绕组正对的位置,达到了反电动势的峰值,用公式表示就是

其中,  表示的就是电角度。
表示的就是电角度。
那么按照上图所示,HALL A在哪里达到上升沿呢?就是电角度为270°的位置。在90°-270°,霍尔传感器A所对应S极比N极的区域更大,因此总的磁场是负值,通过传感器中比较器输出0电平;而由270°-90°的区间内正相反,传感器输出高电平,一般为5V。所以,转子逆时针穿过270°电角度过程中,电平从低到高出现上升沿;而穿过90°,出现下降沿。
所以在上图中,同步相位角应该是多少呢?就是 霍尔上升沿角度-反电动势峰值角度,也就是270°或者-90°。也就是说,当我们用霍尔传感器角度来估计转子位置的时候,要减去一个固定的偏移,也就是同步相位角,我们用公式表示为
三相无刷电机的U相的反电势的最高点为电角度的0°
电机 Hall A 的上升沿到电机 A 相反电动势最高点的延迟角度为同步电角度
- 为什么要测量Hall同步角度
如果角度偏差较大时会影响控制效果, 可能会降低效率或者使电机震荡,
在每次 Hall 信号变化时同步电角度,可以减小因为角度偏差带来的影响,初始的测试还是很有必要的。 - 测量方法
- 连接电机虚拟中点
电机测量前如果没有虚拟中点的话,需要需要连接三个相同阻值电阻到电机的三相接线上, 电阻另外一端连接到 一起作为虚拟中点
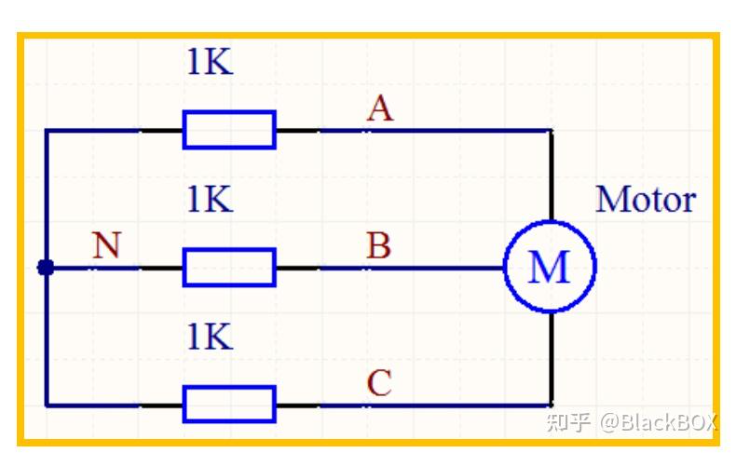
- Hall 接入5V,将端口输出上拉
- 确定UVW相和 Hall 的 ABC 对应关系
有感驱动无刷电机的情况下,UVW 和 HALL 的ABC是一定需要一一对应的,否则会导致电机运行出错,假设拿到一个电机的时候,并没有提供相序和 Hall 输出的对应关系,那么可以按照以下的步骤进行确定 - 确定 Hall 的 ABC
![image]()
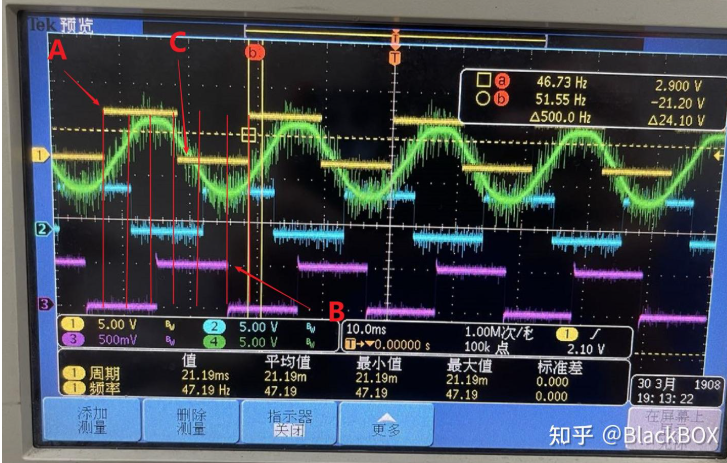
首先任定一个输出为 Hall 的 A 输出
如图可以看到,通道3的高电平较通道2先出现(通道3下降沿在前),则通道3为 B 输出,通道2(通道2下降沿在后)就为 C 输出,如此便确定了 Hall 的 ABC 端口
- 确定电机的 UVW 三相
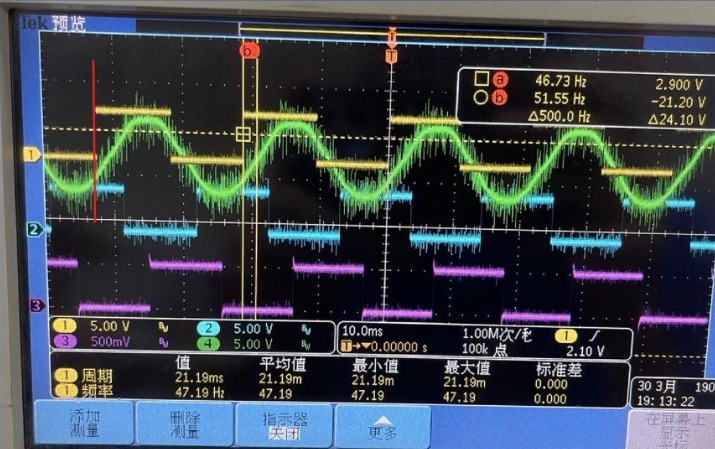
- 确定 U 相
虽然说电机的三相和Hall sensor 会存在一定的偏移角度,但是 Hall 的上升沿一定在它对应的相序的上升沿上,图中所示的是 U 相的反电势和 Hall 信号,很明显,通道1和通道4是一一对应的关系,而通道2和3,直接落在了反电势的下降沿或者波峰上,所以,只要 Hall 信号的上升沿处于反电动势上升沿一个比较合适的位置,就可以确定他们是一一对应的,这样便确定了通道 4 为电机的 U 相
- 确定 V W 两相
- 通过 Hall 来确定
从以上的方法我们确定了 U 相,U 相和 Hall A 的偏移角度跟 V 相和 Hall B 的偏移角度是一致的,Hall 的 ABC 我们是确定的,所以只要查看BC的上升沿处于另外两相的什么位置,便可以确定 V 和 W - 通过反电动势来确定
确定 U 相之后,超前 U 相120°的为W相,滞后120° 的为V相。 如图,通道1为 U 相,通道2为 V 相,3为 W 相

- 电角度计算
- 测量周期
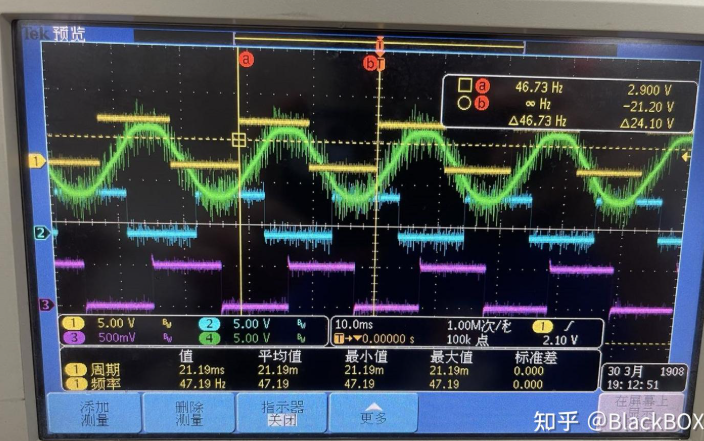
周期为 1/46.73 s
- 测量偏移时间
此处没有直接测量到波峰的偏移时间,不过弦波从0到1所对应的角度为90°,所以在最后的结果上加 90° 即可
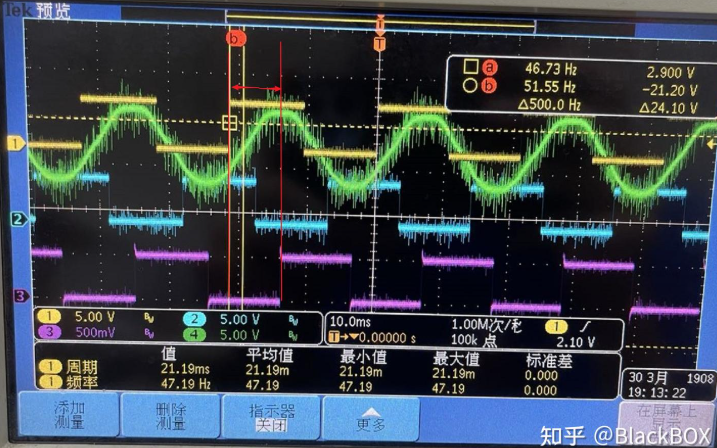
此处偏移的时间为 1/500 s
- 计算电角度
刚才算的是 Hall 上升沿到 0°的差值,上面提到电角度0°是从U相的波峰开始的,可以一开始就直接测量波峰到上升沿的差值,有时候波峰不够尖锐,选择的点不够准确,就可以像这样先计算出到 0° 的差值,之后再加上 90° 即可,所以,所测电机的同步电角度为
此处有两种表示方法,hall 的上升沿在反电势之前,可以说 hall 超前 -123°
也可以以前一个周期为参考标准,则可以表示为 hall 滞后了 360° - 123° = 237°
参考文章
链接:https://www.zhihu.com/question/365699377/answer/16963796598
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
 Deployment 副本控制器)










)






详解——观察者模式(Observer)(1) - 教程)
