震动传感器简单介绍

若产品不震动,模块上的 DO 口输出高电平;
若产品震动,模块上的 DO 口输出低电平,D0-LED绿色指示灯亮。
震动传感器与STM32的接线

编程实现
需求:当震动传感器接收到震动信号时,使用中断的方式点亮led1。
1、打开cubeMX
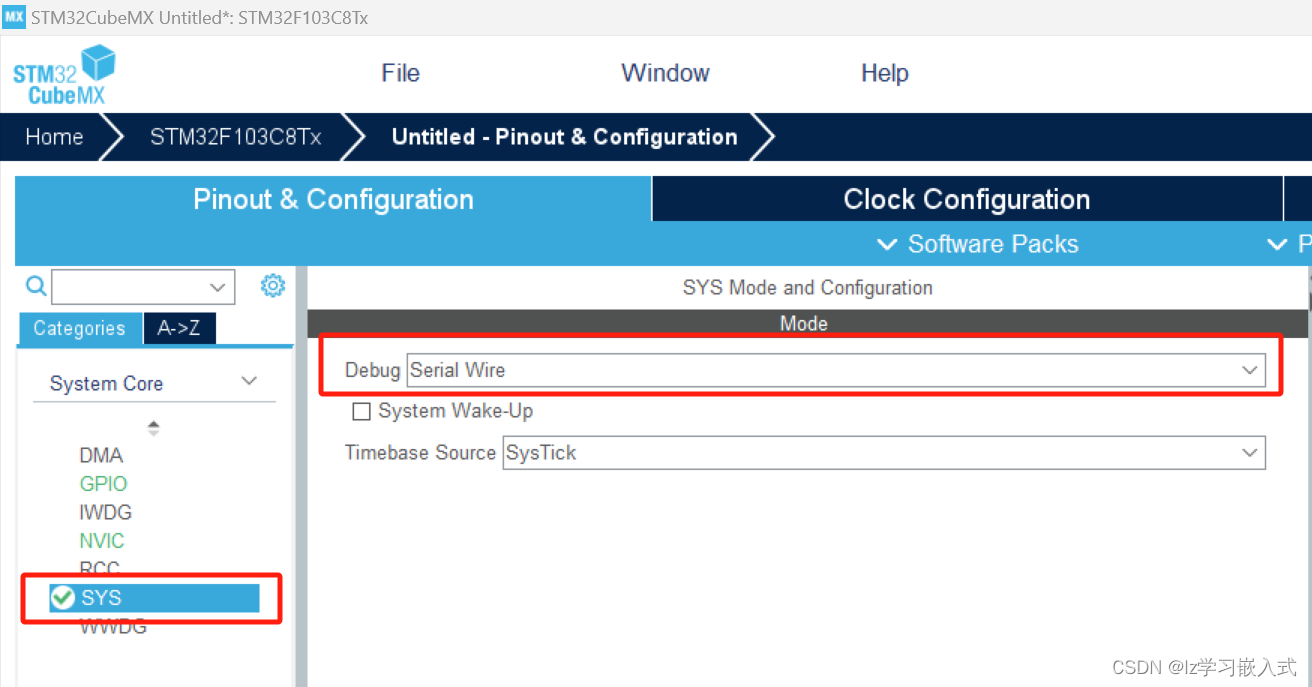
a.在SYS中选择调试方式为串行线调试。
b.在RCC(复位和时钟控制)中选择 HSE(高速时钟)为crystal resonator(晶振)。

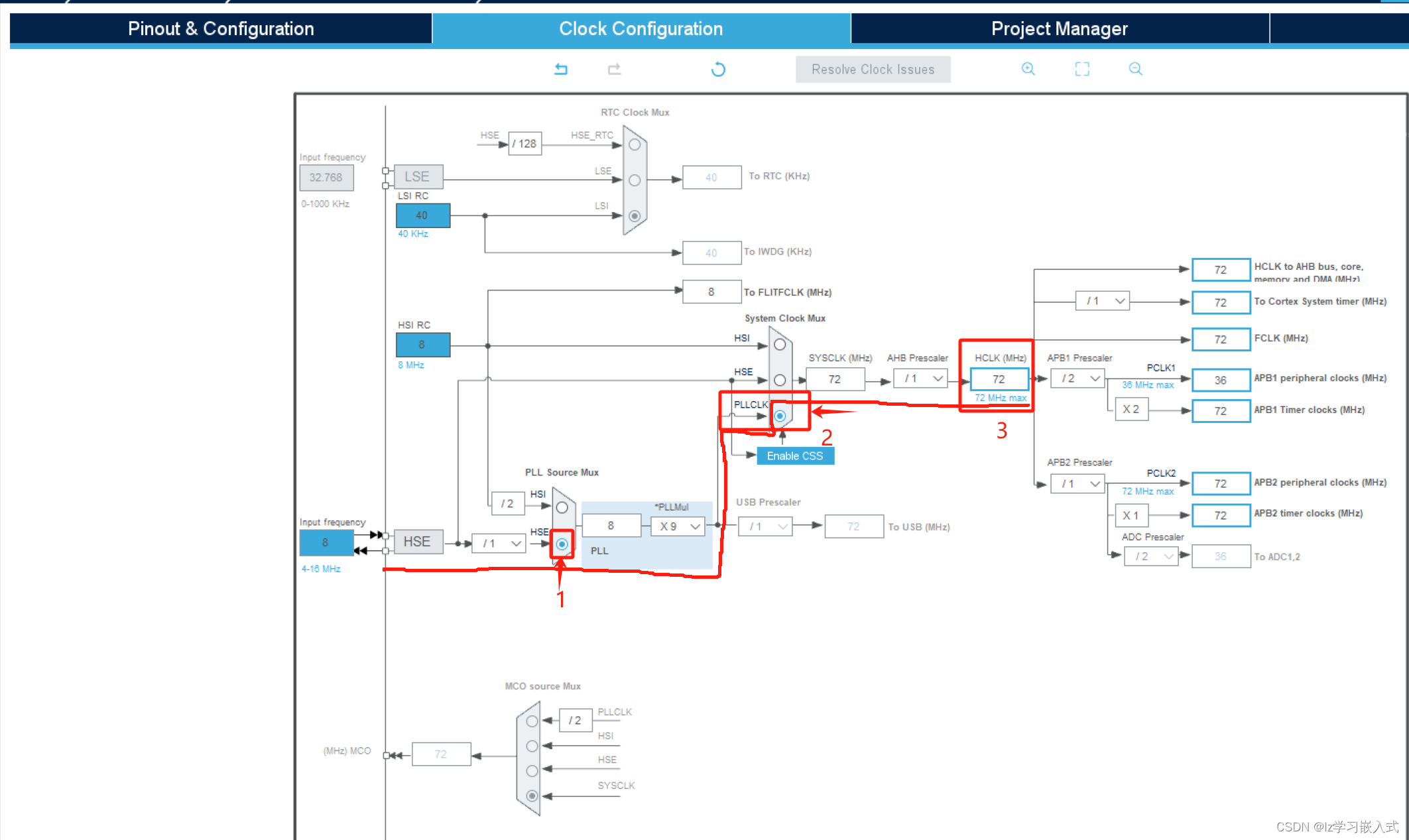
c.在CLOCK Configuration中沿着红色的主线依次选择,并将频率改为72MHZ。
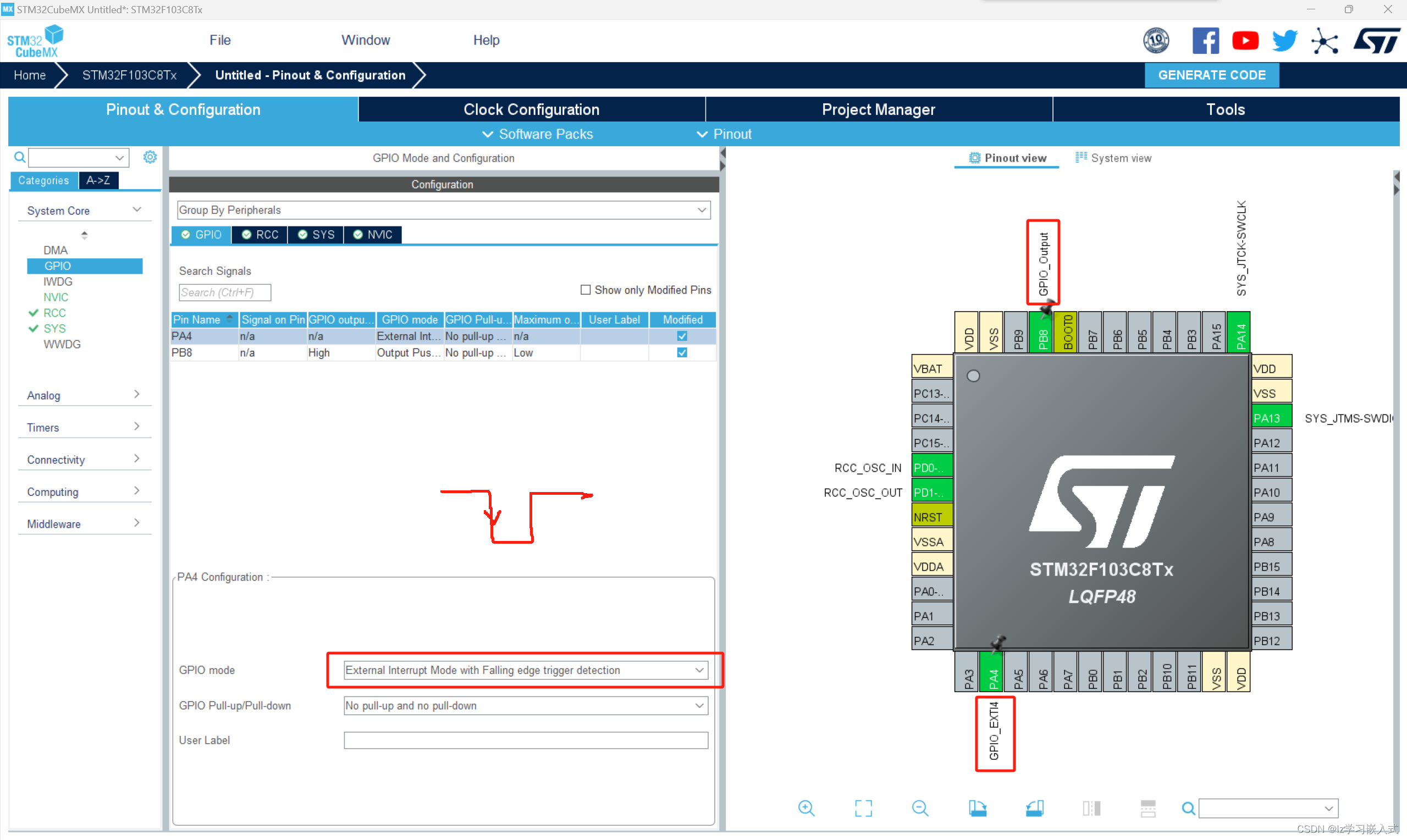
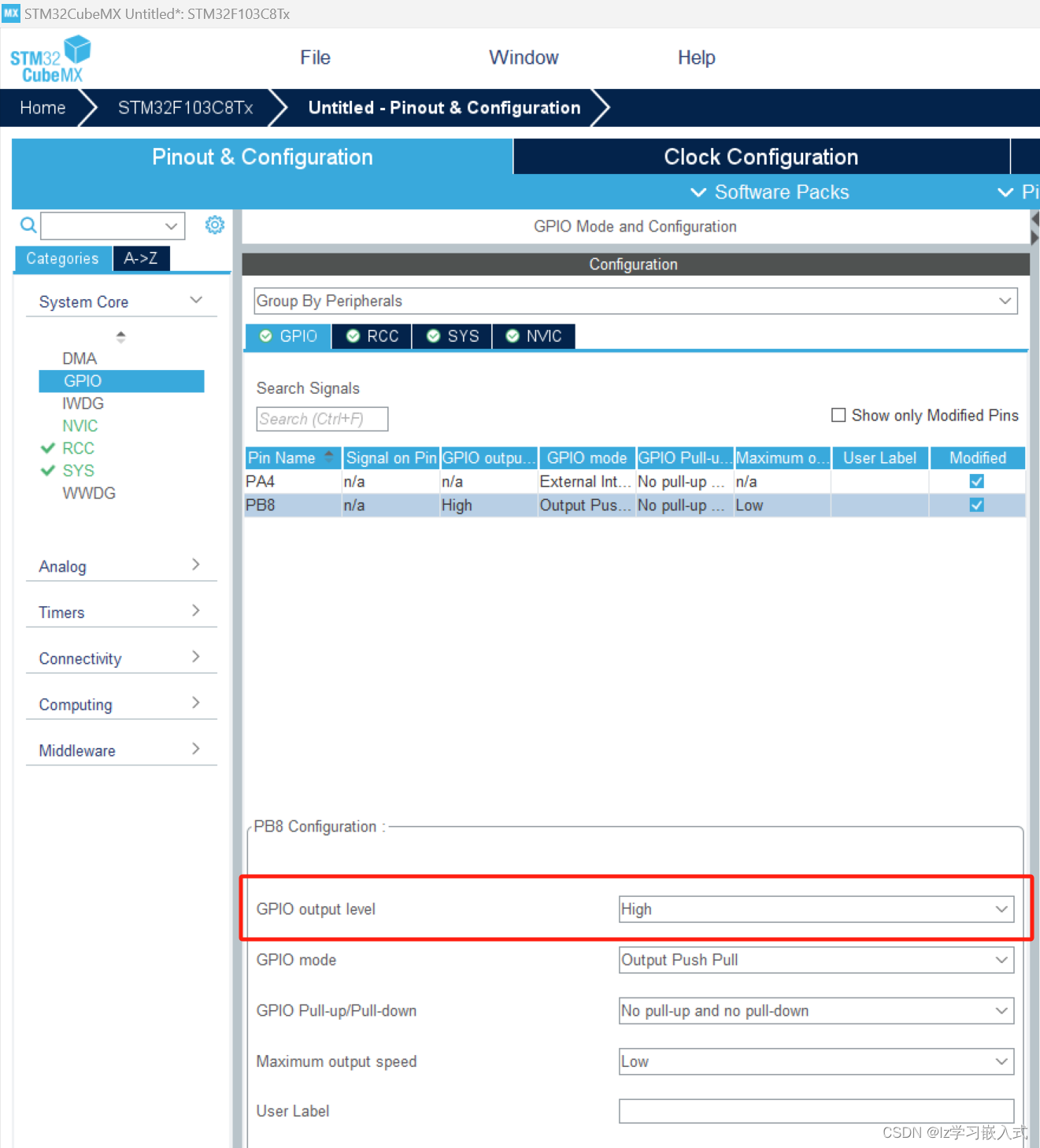
d.在GPIO中选择PB8(LED1)为GPIO_output,PA4为中断方式触发,选择GPIO_XETI 4,并且因为震动传感器震动,模块上的DO口输出低电平,所以将GPIO_mode设置为下降沿触发,由于一开始需要让led1是灭的状态,所以设置PB8的GPIO output level为HIGH。
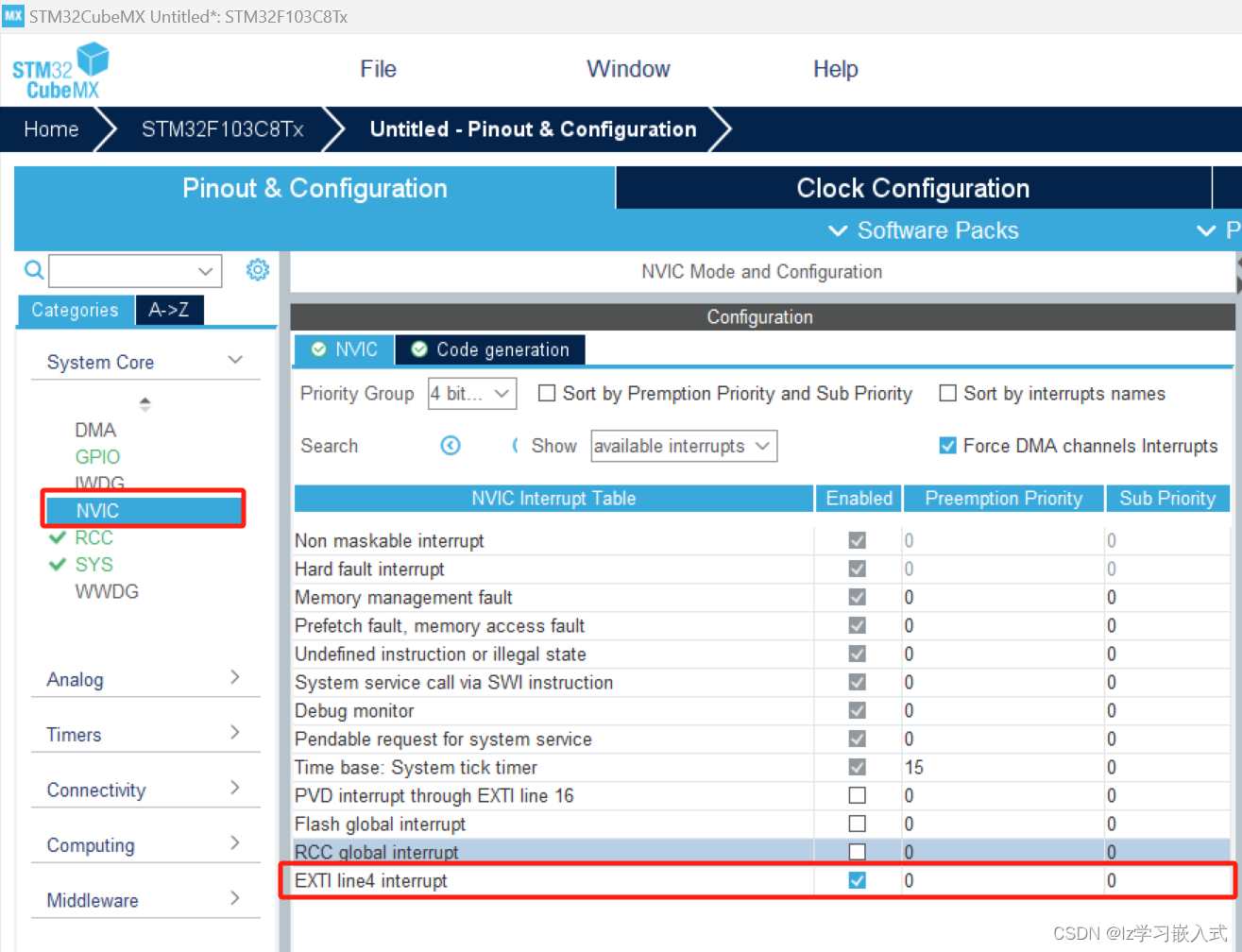
e.在NVIC中打开PA4的中断,使能中断。
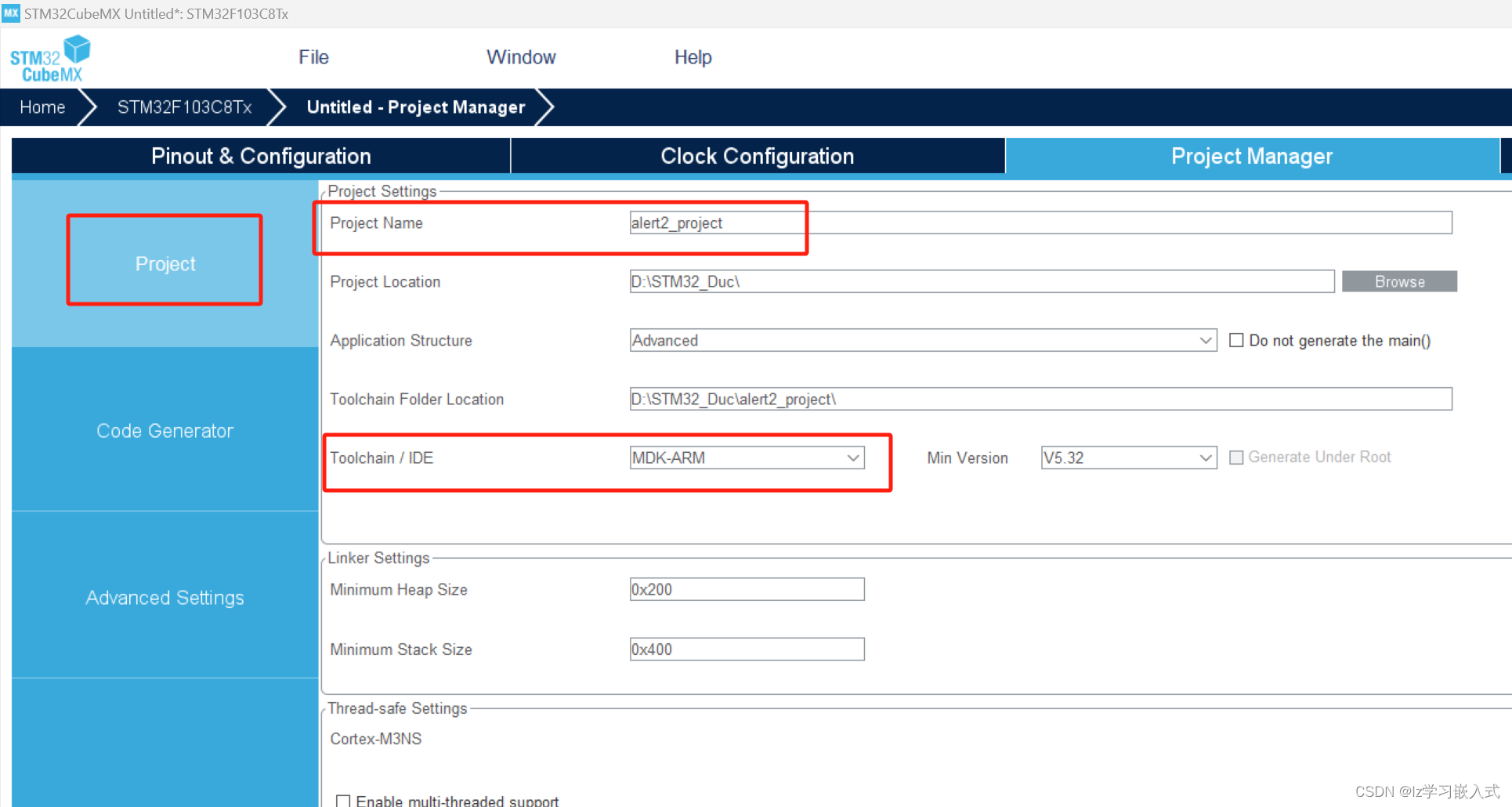
f. 在Project Manager中设置工程名字、开发环境选择MDK-ARM,并且勾选以下两个选项

g. Generate Code
2、打开KEIL5工程
a.先进行编译,然后找到EXTI 4中断服务程序,选中调用的函数点击F12,跳转到被调用函数


b.将虚函数复制到main函数文件中,进行编写
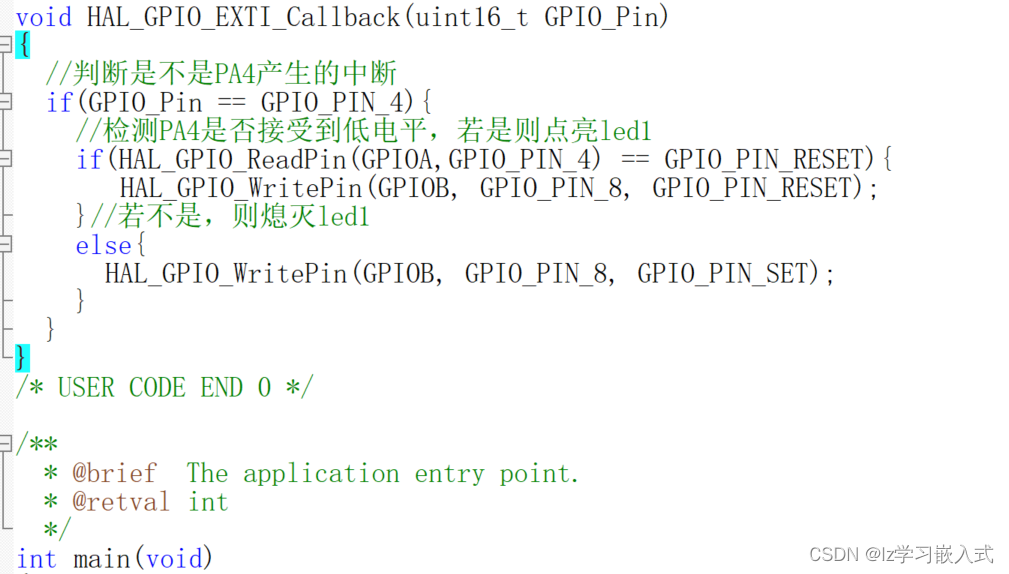
c.添加延时,接收到震动信号就亮1秒
但是延时有个坑!!!
如果直接在中断服务函数里调用 HAL_Delay 函数,则会造成系统卡死。
原因:程序初始化时 默认把滴答定时器的中断优先级设为最低 ,其它中断源很容易打断它导致卡
死。
解决:在 main 函数里使用以下函数提高滴答定时器的中断优先级(提升至 0 ):
HAL_NVIC_SetPriority ( SysTick_IRQn , 0 , 0 );
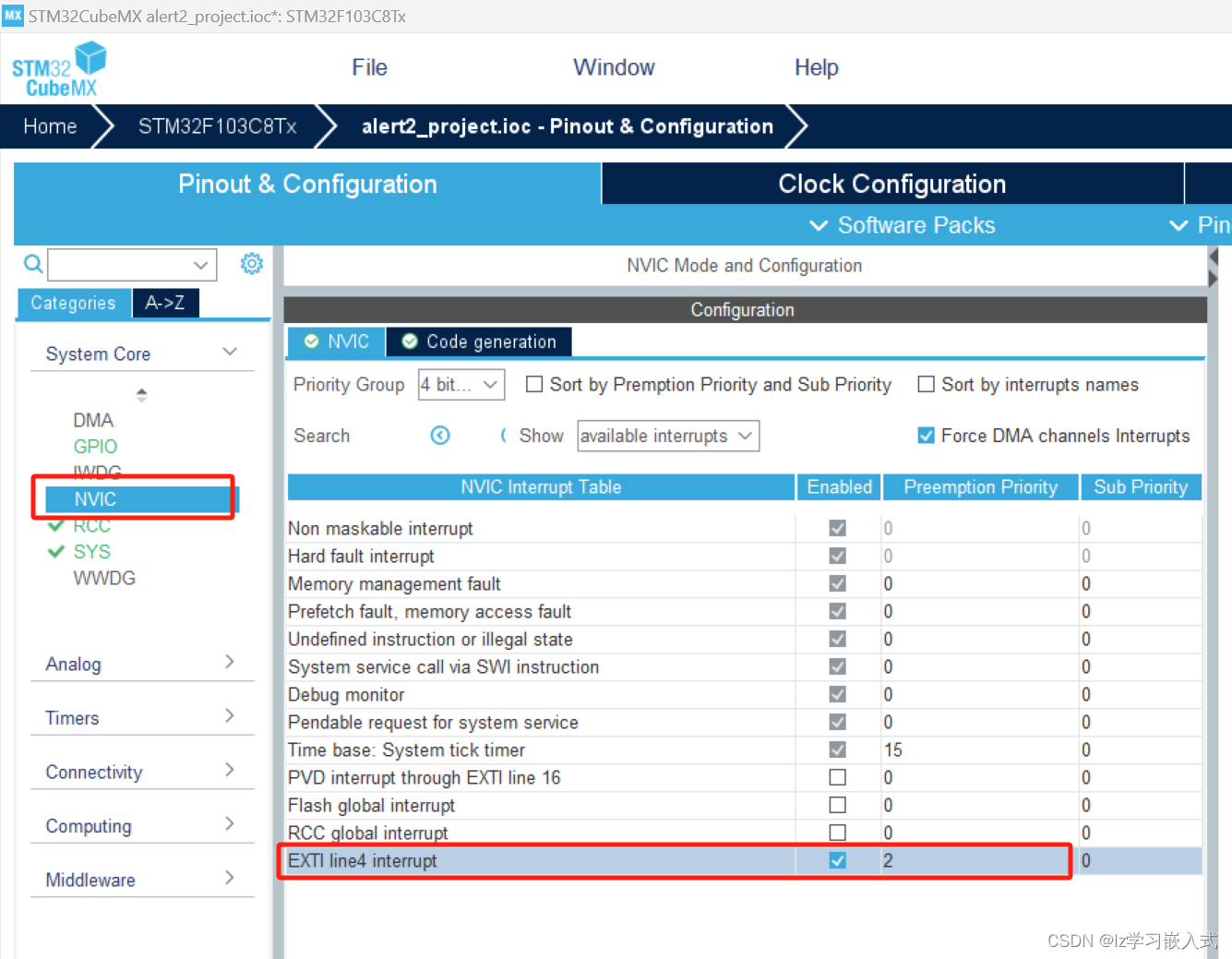
并且将 EXTI4 的中断优先级设置比滴答定时器的中断优先级小,比如 2 。











)




剖析)



