1、WIZnet全硬件TCP/IP协议栈
WIZnet全硬件TCP/IP协议栈,支持TCP,UDP,IPv4,ICMP,ARP,IGMP以及PPPoE协议。
以太网:支持BSD和WIZCHIP(W5500/W5300/W5200/W5100/W5100S)的SOCKET APIs驱动程序。
互联网:
DHCP客户端
DNS客户端
FTP客户端
FTP服务器
SNMP代理/陷阱
SNTP客户端
TFTP客户端
HTTP服务器
MQTT客户端
其他功能将陆续添加。
ioLibrary库下载地址: https://gitcode.com/gh_mirrors/io/ioLibrary_Driver?utm_source=csdn_github_accelerator&isLogin=1
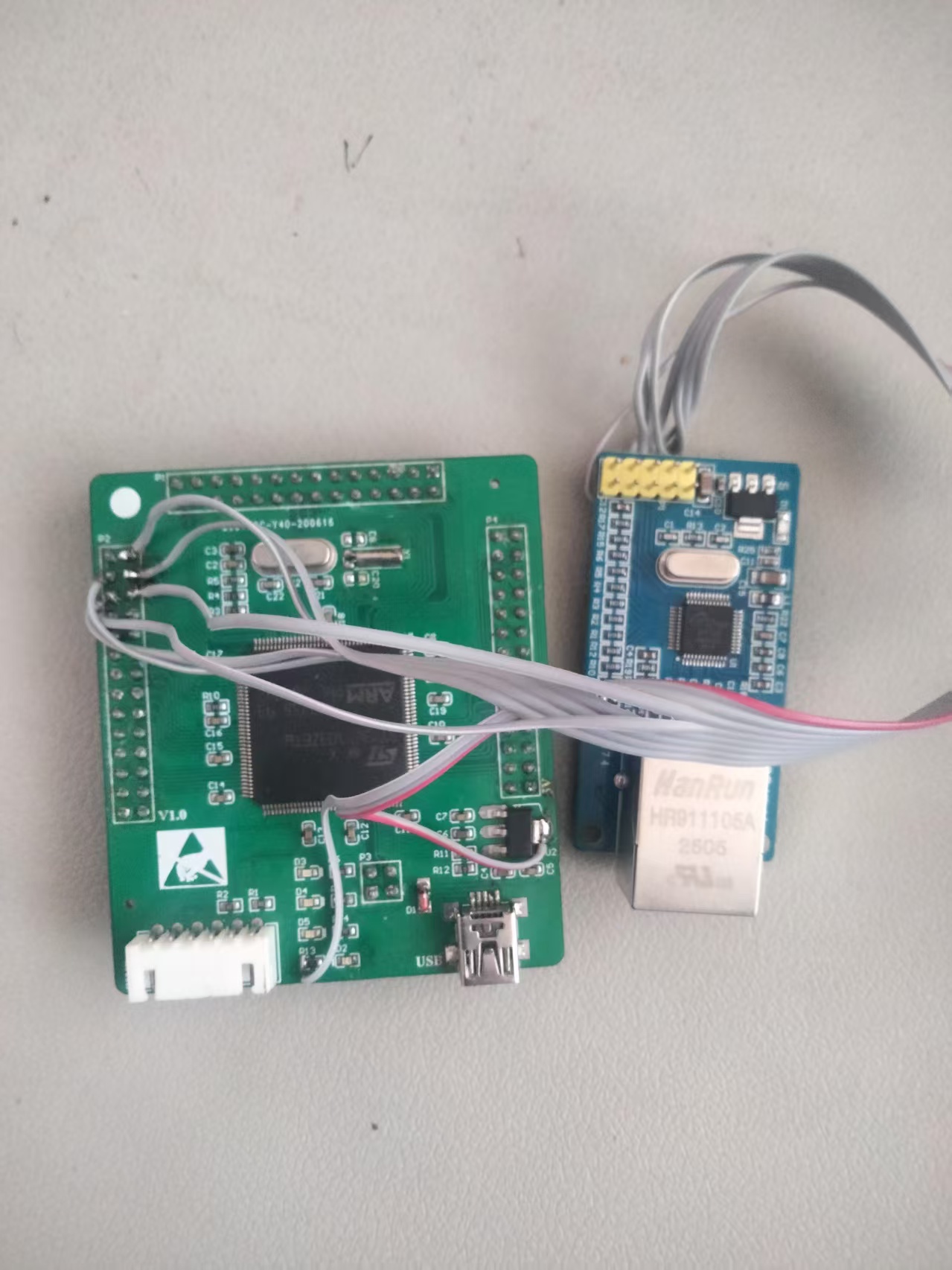
案例:项目首页 - MINISTM32移植W5500ioLiberary:MINISTM32 移植W5500 ioLiberary项目为开发者提供了在MINISTM32平台上移植W5500网络芯片的完整解决方案。该项目包含移植所需的库文件和示例代码,帮助开发者快速上手并实现网络通信功能。通过详细的移植说明和步骤,开发者可以轻松完成配置和调试,节省开发时间。无论是初学者还是有经验的工程师,都可以利用该项目在STM32F103RCT6平台上高效集成W5500,实现稳定的网络连接。项目资源丰富,文档清晰,是嵌入式网络开发的理想选择。 - GitCode

internet文件夹
W5500文件夹

2、W5500芯片
W5500是一款全硬件TCP/IP以太网控制器。W5500集成了TCP/IP协议栈,10/100M以太网数据链路
层(MAC)及物理层(PHY),使得用户使用单芯片就能够在他们的应用中拓展网络连接。
支持8个独立端口(Socket)同时通讯,每一个 Socket 的发送 缓存区都在一个 16KB 的物理发送内存中,初始化分配为 2KB。每一个 Socket 的接收缓 存区都在一个 16KB 的物理接收内存中,初始化分配为 2KB。
W5500提供了SPI接口,最大支持80MHz速率,W5500支持SPI模式0和模式3。
3、配置使能W5500驱动
添加wizchip_conf.c,w5500.c和socket.c到工程中。打开wizchip_conf.H,找到_WIZCHIP_宏定义,修改如下:
#ifndef _WIZCHIP_
// NOTE_LIHAN: Some sections of this code are not yet fully defined.
#define _WIZCHIP_ W5500 // W5100, W5100S, W5200, W5300, W5500, 6300
//将_WIZCHIP_宏设置为W5500,2025年5月15日修改
#endif
4、添加SPI1驱动程序
//函数功能:
//初始化SPI1_SCL为PA5,SPI1_MISO为PA6,SPI1_MOSI为PA7,SPI1_CS为PA3;
//设置SPI1的工作模式
void W5500_SPI_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA的外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE); //使能SPI1的外设时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //选择PIN5,是SPI1的SCL
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //选择引脚为复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置引脚的最高工作速率为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据GPIO_InitStructure结构指针所指向的参数配置PA5引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6; //选择PIN6,是SPI1的MISO
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //选择引脚为输入悬浮
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置引脚的最高工作速率为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据GPIO_InitStructure结构指针所指向的参数配置PA6引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7; //选择PIN7,是SPI1的MOSI
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //选择引脚为复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置引脚的最高工作速率为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据GPIO_InitStructure结构指针所指向的参数配置PA7引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; //选择PIN3,是W5500的片选脚CS
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //选择引脚为推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设置引脚的最高工作速率为50MHz
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据GPIO_InitStructure结构指针所指向的参数配置PA3引脚
//设置SPI1的工作模式
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
//SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI发送接收为8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low; //设置SCK空闲时钟为低电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_1Edge; //数据捕获于第1个时钟沿
//SCK空闲时钟为低电平,数据捕获于第1个时钟沿,这样就设置了SPI从机在下降沿采集数据了
//SPI从机在下降沿采集数据,这要求CPU必须在SCK上升沿输出位值,在SCK为高电平时达到稳定,为数据采集做好准备
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //设置NSS输出由SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_2;
//设置波特率预分频值为2
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //设置数据传输先从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //使用CRC7校验
SPI_Init(SPI1, &SPI_InitStructure);
SPI_Cmd(SPI1, ENABLE); //使能SPI外设
}
#define W5500_CS_high() GPIO_SetBits(GPIOA,GPIO_Pin_4) //W5500片选引脚
#define W5500_CS_low() GPIO_ResetBits(GPIOA,GPIO_Pin_4) //W5500片选引脚
//函数功能:选择W5500
void SPI_CS_Select(void)
{
W5500_CS_low();
}
//函数功能:不选择W5500
void SPI_CS_Deselect(void)
{
W5500_CS_high();
}
//函数功能:从W5500读取一个字节
uint8_t SPI_ReadByte(void)
{
uint8_t byte;
byte=SPI_I2S_ReceiveData(SPI1);//虚读一次
SPI_I2S_SendData(SPI1,0x00);//通过外设SPI1发送0x00为的是发送8个移位时钟
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);
//检查SPI1标志位,是否设置"发送缓存空标志位",等待数据寄存器空
byte=SPI_I2S_ReceiveData(SPI1);//读取1个字节数据
return byte;
}
//函数功能:将byte发送给W5500
void SPI_WriteByte(uint8_t byte)
{
SPI_I2S_SendData(SPI1,byte);//通过外设SPI1发送一个数据
while(SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET);
//检查SPI1标志位,是否设置"发送缓存空标志位",等待数据寄存器空
}
//函数功能:关闭总中断
void SPI_CrisEnter(void)
{
__set_PRIMASK(1);//关闭总中断
}
//函数功能:使能总中断
void SPI_CrisExit(void)
{
__set_PRIMASK(0);//开放总中断
}
5、TCP客户端应用程序W5500_HD_Driver.c
#include "W5500_HD_Driver.h"
#include "stdio.h" //getchar(),putchar(),scanf(),printf(),puts(),gets(),sprintf()
#include "socket.h" // Just include one header for WIZCHIP
#include "SPI1.h"//下载地址: https://gitcode.com/gh_mirrors/io/ioLibrary_Driver?utm_source=csdn_github_accelerator&isLogin=1
//W5500的网络参数
//本地物理地址:00 08 DC 11 11 11
//本地IP地址:192.168.1.199
//本地子网掩码: 255.255.255.0
//本地网关:192.168.1.1
//DNS服务器IP地址:8.8.8.8
//通过手动配置静态IP地址,Static IP configuration by manually.
wiz_NetInfo gWIZNETINFO = { {0x00, 0x08, 0xdc,0x11, 0x11, 0x11},{192, 168, 1, 199},{255,255,255,0},{192, 168, 1, 1},{8,8,8,8},NETINFO_STATIC };//端口0的网络参数
uint16_t LocalPort0=5000; //端口0的本地端口号(5000)
uint8_t DstIP_Port0[4]={192,168,1,190}; //端口0的远程IP地址:192.168.1.190
uint16_t DstPort_Port0=6000; //端口0的远程端口号:6000uint8_t gDATABUF[DATA_BUF_SIZE];//STM32接收/发送W5500的数据缓冲区void W5500_Initialization(void);//函数功能:装载W5500的本地网络参数和端口0的网络参数
void W5500_Load_Net_Parameters(void)
{
//本地物理地址:00 08 DC 11 11 11gWIZNETINFO.mac[0]=0x00;gWIZNETINFO.mac[1]=0x08;gWIZNETINFO.mac[2]=0xdc;gWIZNETINFO.mac[3]=0x11;gWIZNETINFO.mac[4]=0x11;gWIZNETINFO.mac[5]=0x11;//本地IP地址:192.168.1.199gWIZNETINFO.ip[0]=192;gWIZNETINFO.ip[1]=168;gWIZNETINFO.ip[2]=1;gWIZNETINFO.ip[3]=199;//本地子网掩码: 255.255.255.0gWIZNETINFO.sn[0]=255;gWIZNETINFO.sn[1]=255;gWIZNETINFO.sn[2]=255;gWIZNETINFO.sn[3]=0;//本地网关:192.168.1.1gWIZNETINFO.gw[0]=192;gWIZNETINFO.gw[1]=168;gWIZNETINFO.gw[2]=1;gWIZNETINFO.gw[3]=1;//DNS服务器IP地址:8.8.8.8gWIZNETINFO.dns[0]=8;gWIZNETINFO.dns[1]=8;gWIZNETINFO.dns[2]=8;gWIZNETINFO.dns[3]=8;//DHCP模式gWIZNETINFO.dhcp=NETINFO_STATIC;//告诉ioLibrary库,当前使用"静态IP地址"配置//通过手动配置静态IP地址,Static IP configuration by manually.//端口0的本地端口号LocalPort0=5000;//端口0的远程IP地址:192.168.1.190DstIP_Port0[0]=192;DstIP_Port0[1]=168;DstIP_Port0[2]=1;DstIP_Port0[3]=190;//端口0的远程端口号DstPort_Port0=6000;
}/*** @brief Intialize the network information to be used in WIZCHIP* @retval None*/
//函数功能:设置本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP
void network_init(void)
{uint8_t tmpstr[6];ctlnetwork(CN_SET_NETINFO, (void*)&gWIZNETINFO);//设置本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP//设置MAC地址,将gWIZNETINFO.mac写入W5500;//设置网关,将gWIZNETINFO.gw写入W5500;//设置子网掩码,将gWIZNETINFO.sn写入W5500//设置本地IP地址,将gWIZNETINFO.ip写入W5500//将gWIZNETINFO.dns[]拷贝到_DNS_[]中//将gWIZNETINFO.dhcp保存到_DHCP_中ctlnetwork(CN_GET_NETINFO, (void*)&gWIZNETINFO);//读本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP//读MAC地址,保存到gWIZNETINFO.mac//读网关,保存到gWIZNETINFO.gw//读子网掩码,保存到gWIZNETINFO.sn//读本地IP地址,保存到gWIZNETINFO.ip//将_DNS_[]拷贝到gWIZNETINFO.dns[]中//将_DHCP_保存到gWIZNETINFO.dhcp中ctlwizchip(CW_GET_ID,(void*)tmpstr);//读W5500的ID,保存到tmpstr[6]中,"W5500\0",这是ioLibrary驱动定义的ID;//在wizchip_conf.h中定义_WIZCHIP_ID_为"W5500\0"printf("\r\n=== %s NET CONF ===\r\n",(char*)tmpstr);//串口输出W5500的IDprintf("MAC: %02X:%02X:%02X:%02X:%02X:%02X\r\n",gWIZNETINFO.mac[0],gWIZNETINFO.mac[1],gWIZNETINFO.mac[2],gWIZNETINFO.mac[3],gWIZNETINFO.mac[4],gWIZNETINFO.mac[5]);//串口输出W5500的MAC地址printf("SIP: %d.%d.%d.%d\r\n", gWIZNETINFO.ip[0],gWIZNETINFO.ip[1],gWIZNETINFO.ip[2],gWIZNETINFO.ip[3]);//串口输出W5500的IP地址printf("GAR: %d.%d.%d.%d\r\n", gWIZNETINFO.gw[0],gWIZNETINFO.gw[1],gWIZNETINFO.gw[2],gWIZNETINFO.gw[3]);//串口输出W5500的网关地址printf("SUB: %d.%d.%d.%d\r\n", gWIZNETINFO.sn[0],gWIZNETINFO.sn[1],gWIZNETINFO.sn[2],gWIZNETINFO.sn[3]);//串口输出W5500的子网掩码printf("DNS: %d.%d.%d.%d\r\n", gWIZNETINFO.dns[0],gWIZNETINFO.dns[1],gWIZNETINFO.dns[2],gWIZNETINFO.dns[3]);//串口输出W5500的DNS服务器IP地址printf("======================\r\n");
}//函数功能:
//1.初始化SPI接口
//2.注册相关函数
//3.设置W5500每个端口的发送缓冲区和接收缓冲区的大小均为2K字节
//4.等待"以太网"连接完成
//5.装载本地网络参数
//6.设置本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP
void W5500_Initialization(void)
{uint8_t memsize[2][8] = {{2,2,2,2,2,2,2,2},{2,2,2,2,2,2,2,2}};//W5500发送和接收各有8个端口,这里定义每个端口的发送缓冲区和接收缓冲区的大小均为2K字节uint8_t tmp;W5500_SPI_Init(); //W5500 SPI初始化配置reg_wizchip_cris_cbfunc(SPI_CrisEnter, SPI_CrisExit); //注册临界区函数reg_wizchip_cs_cbfunc(SPI_CS_Select, SPI_CS_Deselect);//注册SPI片选信号函数reg_wizchip_spi_cbfunc(SPI_ReadByte, SPI_WriteByte); //注册读写函数if(ctlwizchip(CW_INIT_WIZCHIP,(void*)memsize) == -1){//W5500发送和接收各有8个端口,这里初始化每个端口的发送缓冲区和接收缓冲区的大小均为2K字节printf("WIZCHIP Initialized fail.\r\n");}//等待"以太网"连接完成, PHY link status checkdo{if(ctlwizchip(CW_GET_PHYLINK, (void*)&tmp) == -1){//读PHYCFGR寄存器bit0,若为1,则表示网络已经连接printf("Unknown PHY Link stauts.\r\n");}}while(tmp == PHY_LINK_OFF);W5500_Load_Net_Parameters();//装载W5500的本地网络参数和端口0的网络参数network_init();//设置本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCP
}//函数功能:端口0发送"I am W5500\r\n"
void SOCKET0_Send_Data(void)
{char buf[20];uint16_t len=0;memset(gDATABUF,'\0',sizeof(gDATABUF));strcpy(buf,"I am W5500\r\n");strcat((char*)gDATABUF,buf);len=strlen( (char*)gDATABUF );send(SOCK_TCPS,gDATABUF,len);//发送数据
}void SOCKET0_Work(void)
{uint16_t len=0;switch(getSn_SR(SOCK_TCPS))//获取W5500端口0的状态寄存器{case SOCK_INIT://W5500端口0已经初始化connect(SOCK_TCPS,DstIP_Port0,DstPort_Port0);//将W5500端口0连接到远程IP地址DstIP_Port0和远程端口DstPort_Port0上break;case SOCK_ESTABLISHED://W5500端口0已经连接成功if(getSn_IR(SOCK_TCPS) & Sn_IR_CON){//读端口0的Sn_IR中断标志寄存器的bit0setSn_IR(SOCK_TCPS, Sn_IR_CON);//回写清除中断标志}len=getSn_RX_RSR(SOCK_TCPS);//读端口0接收缓冲区的数据长度if(len){recv(SOCK_TCPS,gDATABUF,len);//读"W5500端口0"的数据,长度为len个字节,保存到gDATABUFprintf("%s\r\n",gDATABUF);send(SOCK_TCPS,gDATABUF,len);//将gDATABUF的前len个字节通过"W5500端口0"发送出去}SOCKET0_Send_Data();break;case SOCK_CLOSE_WAIT://W5500端口0处于等待关闭状态disconnect(SOCK_TCPS);//关闭端口0的连接break;case SOCK_CLOSED://W5500端口0处于关闭状态socket(SOCK_TCPS,Sn_MR_TCP,LocalPort0,0x00);//打开Socket0,打开一个本地端口break;}
}
6、TCP客户端应用程序W5500_HD_Driver.h头文件
#ifndef _W5500_HD_Driver_H_
#define _W5500_HD_Driver_H_#include "stm32f10x.h"//使能uint8_t,uint16_t,uint32_t,uint64_t,int8_t,int16_t,int32_t,int64_t
#include "wizchip_conf.h"extern wiz_NetInfo gWIZNETINFO;//W5500的网络参数#define SOCK_TCPS 0 //端口0
extern uint16_t LocalPort0; //端口0的端口号
extern uint8_t DstIP_Port0[4]; //端口0的远程IP地址
extern uint16_t DstPort_Port0; //端口0的远程端口号#define DATA_BUF_SIZE 2048
extern uint8_t gDATABUF[DATA_BUF_SIZE];#define W5500_CS_high() GPIO_SetBits(GPIOA,GPIO_Pin_4) //W5500片选引脚
#define W5500_CS_low() GPIO_ResetBits(GPIOA,GPIO_Pin_4) //W5500片选引脚extern void W5500_Initialization(void);
extern void SOCKET0_Work(void);
#endif7、main.c程序
#include "stm32f10x.h"//使能uint8_t,uint16_t,uint32_t,uint64_t,int8_t,int16_t,int32_t,int64_t
#include "stdio.h" //getchar(),putchar(),scanf(),printf(),puts(),gets(),sprintf()
#include "string.h" //使能strcpy(),strlen(),memset()
#include "delay.h"
#include "USART4.h"#include "LED.h"
#include "W5500_HD_Driver.h"//#include "W5500_Variable.h"const char CPU_Reset_REG[]="\r\nCPU reset!\r\n";
int main(void)
{// SCB->VTOR = 0x8000000;//中断向量表重定义// SystemInit();delay_init();//延时函数初始化NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);//设置系统中断优先级分组4USART4_Serial_Interface_Enable(115200);printf("%s",CPU_Reset_REG);//调试串口输出"\r\nCPU reset!\r\n"W5500_Initialization();//1.初始化SPI接口//2.注册相关函数//3.设置W5500每个端口的发送缓冲区和接收缓冲区的大小均为2K字节//4.等待"以太网"连接完成//5.装载本地网络参数//6.设置本地网络参数:MAC地址,GW网关,SN子网掩码,本地IP地址,DNS服务器IP地址,DHCPLED_Init();LED0_ON();while(1){LED0=!LED0;delay_ms(1000);SOCKET0_Work();//W5500端口0工作}
}

)

:管道 - 过滤器架构)

![polarctf-web-[简单rce]](http://pic.xiahunao.cn/polarctf-web-[简单rce])

)
)
openjdk17 c++源码垃圾回收安全点信号函数处理线程阻塞)









