双种群进化算法:动态约束处理与资源分配解决约束多目标优化问题
一、引言
约束多目标优化问题(CMOPs)在工程设计、资源分配等领域广泛存在,其核心是在满足多个约束条件的同时优化多个目标函数。传统方法往往难以平衡约束满足与目标优化,导致搜索效率低或陷入局部最优。本文介绍一种基于动态约束处理和资源分配的双种群进化算法(DPCPRA),通过主辅种群协作与动态机制,有效提升求解性能。
二、CMOPs数学模型与挑战
CMOPs的标准形式为:
{ min F ( x ) = ( f 1 ( x ) , f 2 ( x ) , … , f m ( x ) ) s.t. x ∈ Ω g j ( x ) ≤ 0 , j = 1 , 2 , … , p h j ( x ) = 0 , j = p + 1 , … , q \begin{cases} \min \mathbf{F}(\mathbf{x}) = (f_1(\mathbf{x}), f_2(\mathbf{x}), \dots, f_m(\mathbf{x})) \\ \text{s.t.} \quad \mathbf{x} \in \Omega \\ g_j(\mathbf{x}) \leq 0, \ j = 1, 2, \dots, p \\ h_j(\mathbf{x}) = 0, \ j = p+1, \dots, q \end{cases} ⎩ ⎨ ⎧minF(x)=(f1(x),f2(x),…,fm(x))s.t.x∈Ωgj(x)≤0, j=1,2,…,phj(x)=0, j=p+1,…,q
其中, x \mathbf{x} x为决策变量, g j g_j gj和 h j h_j hj分别为不等式和等式约束。约束违反度定义为:
C V j ( x ) = { max { 0 , g j ( x ) } , 不等式约束 max { 0 , ∣ h j ( x ) ∣ − δ } , 等式约束 CV_j(\mathbf{x}) = \begin{cases} \max\{0, g_j(\mathbf{x})\}, & \text{不等式约束} \\ \max\{0, |h_j(\mathbf{x})| - \delta\}, & \text{等式约束} \end{cases} CVj(x)={max{0,gj(x)},max{0,∣hj(x)∣−δ},不等式约束等式约束
总违反度 C V ( x ) = ∑ j = 1 q C V j ( x ) CV(\mathbf{x}) = \sum_{j=1}^q CV_j(\mathbf{x}) CV(x)=∑j=1qCVj(x)。
CMOPs的难点在于:
- 可行区域可能狭小且分散,传统算法易漏解;
- 不可行解的利用不足,多样性维护困难;
- 计算资源分配不合理,导致搜索效率低下。
三、DPCPRA算法原理

1. 双种群架构:主种群与辅助种群
- 主种群(POP1):专注可行解搜索,采用约束主导原则(CDP),优先选择可行解或约束违反度低的不可行解,确保收敛到可行帕累托前沿(CPF)。
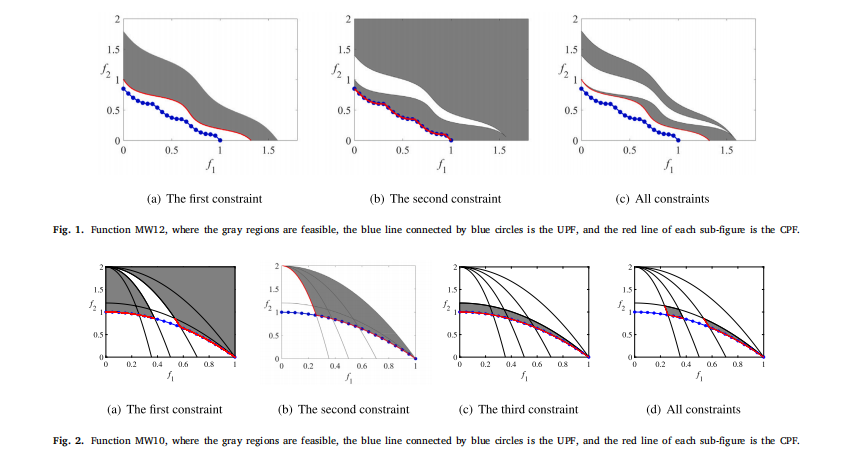
- 辅助种群(POP2):探索不可行区域,通过动态约束处理机制(DCPM)逐步增加处理的约束数量,利用部分约束信息扩大搜索空间,为POP1提供多样性引导。
2. 动态约束处理机制(DCPM)
(1)约束优先级排序
计算每个约束的可行率(Feasible Rate):
Feasible Rate ( j ) = 种群中满足约束 j 的解数量 种群规模 \text{Feasible Rate}(j) = \frac{\text{种群中满足约束}j\text{的解数量}}{\text{种群规模}} Feasible Rate(j)=种群规模种群中满足约束j的解数量
按可行率升序排序,低可行率的约束优先级更高(更难满足),形成约束分组 Group k \text{Group}_k Groupk,每组包含前 k k k个约束。
(2)逐步约束优化
辅助种群从无约束(优化目标函数)开始,逐步加入高优先级约束:
- 初始阶段:忽略所有约束,搜索无约束帕累托前沿(UPF),扩大搜索范围;
- 迭代阶段:按分组依次加入约束,如 Group 1 \text{Group}_1 Group1处理第1个约束, Group 2 \text{Group}_2 Group2处理前2个约束,直至包含所有约束。
通过这种方式,辅助种群在不可行区域中逐步逼近可行区域,避免直接处理所有约束导致的搜索空间爆炸。
3. 动态资源分配方案(DRAS)
根据种群搜索效率动态调整资源分配比例:
- 子生成功率:计算主/辅助种群子代的存活比例
Success_rate 1 = ∣ Off1中存活个体 ∣ ∣ Off1 ∣ , Success_rate 2 = ∣ Off2中存活个体 ∣ ∣ Off2 ∣ \text{Success\_rate}_1 = \frac{|\text{Off1中存活个体}|}{|\text{Off1}|}, \quad \text{Success\_rate}_2 = \frac{|\text{Off2中存活个体}|}{|\text{Off2}|} Success_rate1=∣Off1∣∣Off1中存活个体∣,Success_rate2=∣Off2∣∣Off2中存活个体∣ - 资源分配系数:
ROS 1 = Success_rate 1 Success_rate 1 + Success_rate 2 , ROS 2 = 1 − ROS 1 \text{ROS}_1 = \frac{\text{Success\_rate}_1}{\text{Success\_rate}_1 + \text{Success\_rate}_2}, \quad \text{ROS}_2 = 1 - \text{ROS}_1 ROS1=Success_rate1+Success_rate2Success_rate1,ROS2=1−ROS1
效率高的种群(存活个体多)获得更多计算资源,例如辅助种群在探索复杂不可行区域时分配更多子代生成机会。
四、算法流程
- 初始化:随机生成主种群POP1和辅助种群POP2,初始化存档Archive。
- 第一阶段(约束优先级确定):
- POP1使用CDP处理所有约束,POP2忽略约束搜索UPF;
- 当POP2收敛到UPF时,计算各约束可行率,生成约束分组。
- 第二阶段(动态约束与资源分配):
- POP2按分组逐步加入约束,每次处理 Group k \text{Group}_k Groupk时,若收敛则切换到 Group k + 1 \text{Group}_{k+1} Groupk+1;
- 基于DRAS动态调整POP1和POP2的子代数量,例如 Off1 = ROS 1 × N P / 2 \text{Off1} = \text{ROS}_1 \times NP/2 Off1=ROS1×NP/2, Off2 = ROS 2 × N P / 2 \text{Off2} = \text{ROS}_2 \times NP/2 Off2=ROS2×NP/2;
- 存档Archive保存优秀不可行解,用于辅助种群重新初始化。
五、关键公式总结
| 模块 | 公式 | 作用 |
|---|---|---|
| 约束违反度 | C V ( x ) = ∑ j = 1 q C V j ( x ) CV(\mathbf{x}) = \sum_{j=1}^q CV_j(\mathbf{x}) CV(x)=∑j=1qCVj(x) | 衡量解的约束满足程度 |
| 可行率 | Feasible Rate ( j ) = 满足约束 j 的解数 N P \text{Feasible Rate}(j) = \frac{\text{满足约束}j\text{的解数}}{NP} Feasible Rate(j)=NP满足约束j的解数 | 评估约束难度,确定优先级 |
| 子生成功率 | Success_rate = 存活子代 生成子代 \text{Success\_rate} = \frac{\text{存活子代}}{\text{生成子代}} Success_rate=生成子代存活子代 | 衡量种群搜索效率 |
| 资源分配系数 | ROS i = Success_rate i Success_rate 1 + Success_rate 2 \text{ROS}_i = \frac{\text{Success\_rate}_i}{\text{Success\_rate}_1 + \text{Success\_rate}_2} ROSi=Success_rate1+Success_rate2Success_ratei | 动态调整计算资源分配 |
六、实验验证与优势
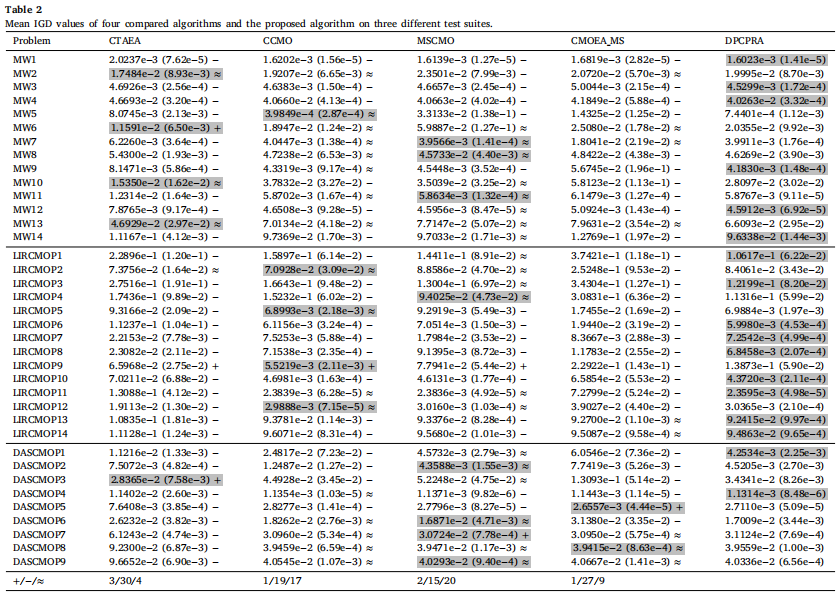
通过MW、LIRCMOP、DASCMOP三大测试集验证,DPCPRA在可行率(RFS)、逆世代距离(IGD)、超体积(HV)等指标上优于主流算法(如CTAEA、CCMO)。核心优势:
- 双种群协作:主种群保证可行性,辅助种群挖掘不可行解价值,平衡收敛与多样性;
- 动态机制:DCPM逐步释放约束复杂度,DRAS按需分配资源,适应不同问题结构;
- 泛化能力:在高维、多约束场景下表现优异,适用于工程优化等实际问题。
七、总结与引用
本文提出的DPCPRA通过双种群架构、动态约束处理和资源分配,有效解决了CMOPs中约束与目标的平衡问题。实验表明,该算法在基准测试和实际问题中均表现出优越性能,为复杂约束优化提供了新思路。
引用文献
Qiao K, Chen Z, Qu B, et al. A dual-population evolutionary algorithm based on dynamic constraint processing and resources allocation for constrained multi-objective optimization problems[J]. Expert Systems with Applications, 2024, 238: 121707.










)

)

+论文+数据+源码)
拉流至电脑,实现直播)



