《IET Cyber-Systems and Robotics》出版山东大学 Tenglong Zhang 和 Guoliang Liu 团队的研究成果,文章题为“Adaptive Safe Braking and Distance Prediction for Overhead Cranes With Multivariation Using MLP”。
摘要
桥式起重机的紧急制动及其制动距离预测是其安全运行中的关键难题。本文采用多层感知器(MLP)实现具有多种变量的桥式起重机自适应安全距离预测功能。首先,构建了桥式起重机的离散动力学模型,并在角度约束下引入模型预测控制(MPC)以保证安全制动;其次,分析并筛选了影响安全距离预测的输入变量,分别评估其对MLP预测精度的影响;然后,构建训练集和测试集,在训练集上对MLP模型进行了优化;最后,与传统nlinfit算法对比,结果表明基于MLP的自适应安全距离预测方法在桥式起重机中的应用更具优越性。实验证实,该方法可有效抑制载荷摆动角度,实现最小摆角的安全制动,研究结果具有显著实用价值和创新性。
在现代工业生产与运输中,桥式起重机因其能够高效搬运重型货物而被广泛应用于各类场景。然而,这类系统通常通过操作小车进行控制,导致其本质上是一种欠驱动系统,增加了控制复杂性。尤其在动态环境中,工人和起重机共存的情况下,制动时的突发停止可能引发显著的负载摆动,进而增加事故风险。因此,如何实现起重机系统的摆动控制成为研究热点之一。
近年来,许多学者围绕起重机的自动控制展开了大量研究,提出了多种控制方法,包括输入成形算法、模糊控制、滑模控制、具有参数自适应机制的非线性控制以及模型预测控制(MPC)等。其中,模型预测控制凭借其对未来事件的预测能力和优化控制的优势,在满足摆角幅度限制和速度等安全约束方面表现出色。例如,Fang等人提出了一种将摆动约束转化为控制输入约束的新型MPC算法,有效将负载摆动控制在可接受范围内,提升了系统性能。
尽管如此,实际应用中,桥式起重机在快速停车或突发制动时往往处于非零初始状态,这会导致强烈的剩余负载摆动,从而增加事故风险。大多数现有控制方法未能充分考虑这一问题,尤其是在应对复杂的动态环境(如制动过程中负载摆幅和初始速度的变化)方面显得不足。因此,研究人员开始关注在控制过程中准确预测起重机的安全制动距离,特别是在起重机具有非零初始速度的情况下。
为解决这一问题,本文提出了一种基于多层感知机(MLP)神经网络的安全制动距离预测算法,并将其与MPC方法结合。该方法不仅能够在不同初始状态下精确预测起重机的安全制动距离,还能实时调整控制策略,确保负载摆幅保持在安全范围内。这种方法的创新之处在于其处理起重机在现实操作中遇到的复杂动态变化的能力,为起重机的安全控制提供了新的思路和方法。
动态模型的构建
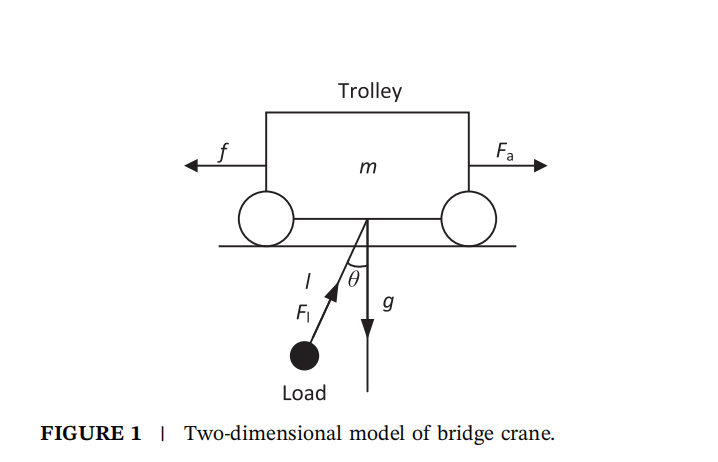
论文首先通过拉格朗日方程推导了桥式起重机系统的动态模型,并将其简化为二维动态模型并进行了线性化处理。通过分析系统的广义坐标下的拉格朗日方程,得到了描述系统运动的微分方程。随后,假设绳索长度在负载水平移动过程中不变,进一步简化了模型,得到了适用于制动过程分析的线性化二维动态模型。
制动算法的设计
为了实现从非零初始状态到安全平稳停止的过渡,文中采用了基于MPC的防摆控制方法。通过对连续状态空间表达式的离散化,建立了离散状态空间模型,并进一步实现了模型的滚动时域控制。参考轨迹的设计基于非零初始状态,利用双曲正切函数构造了一个满足快速稳定制动要求的参考轨迹。成本函数则通过最小化系统状态与参考轨迹之间的差异来定义,最终通过求解不等式约束优化问题得到最优控制输入。
安全距离预测模型的构建
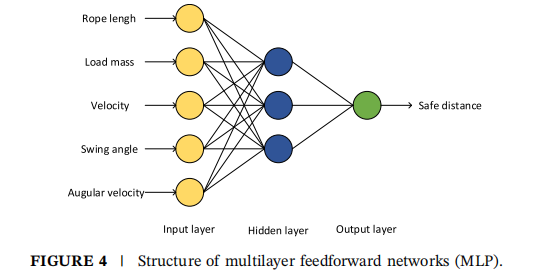
考虑到初始速度、负载摆角及其角速度对系统安全制动距离的影响,同时结合绳索长度和负载重量的变化,本文设计了一个基于MLP网络的安全距离预测模型。该模型的输入包括绳索长度、负载质量、小车速度、负载摆角及角速度。为了确保MLP网络不会退化为线性模型,训练过程中选用了ReLU激活函数。
在实验部分,通过比较MLP网络与nlinfit算法的表现,验证了基于MLP的安全距离预测模型的优越性。实验结果表明,MLP网络在预测精度上明显优于传统方法,尤其是在处理多变量非线性拟合任务时展现出更高的准确性。
实验平台与算法验证
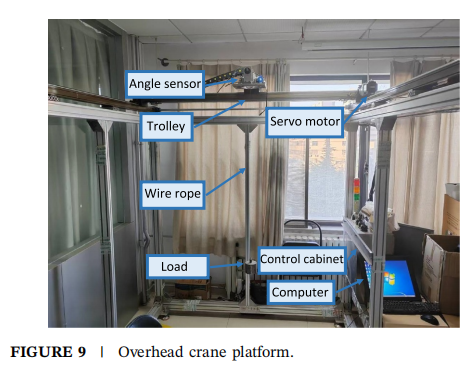
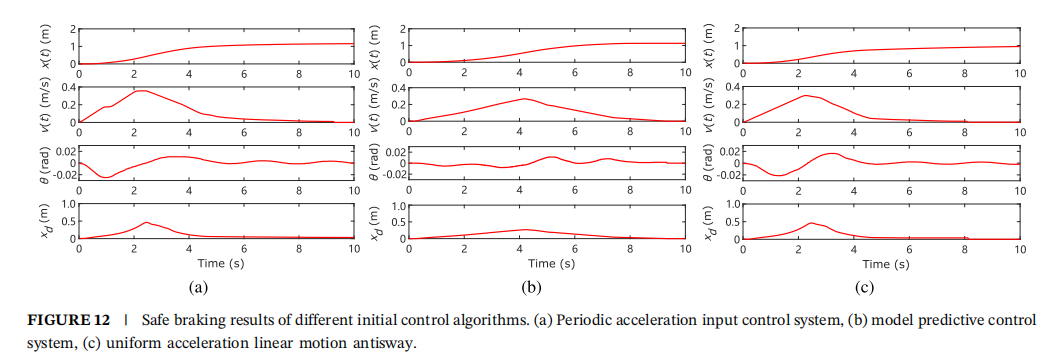
为了进一步验证所提出的自适应安全距离预测与安全制动算法的有效性,作者在真实的桥式起重机实验平台上进行了测试。实验结果显示,无论采用何种初始控制算法,若系统突然进入制动状态,该算法均能实现在桥梁起重机定位操作中与障碍物碰撞前的安全稳定停止。此外,实验还证明了该方法在各种现实环境中的一致可靠性,确保了负载在整个制动过程中的摆动及其残余量始终保持在系统规定的范围内。
结论
本文针对桥式起重机与障碍物之间的安全制动距离预测问题,提出了一种综合考虑多种影响因素的方法——基于MLP网络的安全制动距离预测模型,并将其与MPC制动控制器相结合,以满足安全制动需求。相较于另一种多变量非线性回归方法,基于MLP网络的安全制动距离预测方法展示了更高的预测精度。通过在真实起重机平台上的实验验证,证实了该方法在满足安全制动要求方面的有效性。
总的来说,这项研究不仅为桥式起重机的安全控制提供了新的解决方案,也为其他类型的起重设备乃至更广泛的工业自动化领域带来了启示。未来的工作可以进一步探索如何将更多先进的机器学习技术应用于此类复杂系统的控制中,以提升整体的安全性和效率。

)



--- 销量预估)





)

 : Fisk‘s proof)





